Die CNC-Bearbeitung für die Robotik kommt zum Einsatz, wenn ein Roboterteil eine präzise Geometrie, eine wiederholbare Passgenauigkeit und eine bestimmte Materialfestigkeit erfordert, die mit weniger präzisen Fertigungsverfahren nur schwer zu erreichen sind.
Häufig handelt es sich dabei um wichtige Maschinenteile wie Arme, Gelenke, Zahnräder, Gehäuse, Greifer, Halterungen und Sensorhalterungen, da diese Teile die Bewegung, die Steifigkeit, die Ausrichtung und die Montageleistung beeinflussen.
Für Konstruktionsteams stellt sich nicht in erster Linie die Frage, ob ein Bauteil mittels CNC-Bearbeitung hergestellt werden kann. Viel wichtiger ist die Frage, ob die Konstruktion für die Bearbeitung unter Berücksichtigung der geforderten Toleranz, des Materials, der Kosten und der Vorlaufzeit geeignet ist. Ein Robotergelenk mit Lagersitzen, Getriebeschnittstellen, Motorhalterungen und Sensoraufnahmen mag technisch zwar bearbeitbar sein, doch die Konstruktion muss möglicherweise noch angepasst werden, um den Zugang für die Werkzeuge, die Einrichtungssteuerung, die Prüfung oder die Passgenauigkeit bei der Montage zu gewährleisten.
Dieser Leitfaden konzentriert sich auf praktische Entscheidungsaspekte: Wann ist eine CNC-Bearbeitung erforderlich, wo können dabei Risiken entstehen, welche Werkstoffe kommen üblicherweise in Frage und was sollten Einkäufer prüfen, bevor sie ein CNC-gefertigtes Roboterkomponententeil freigeben?.
Was ist CNC-Bearbeitung in der Robotik und warum ist sie wichtig?
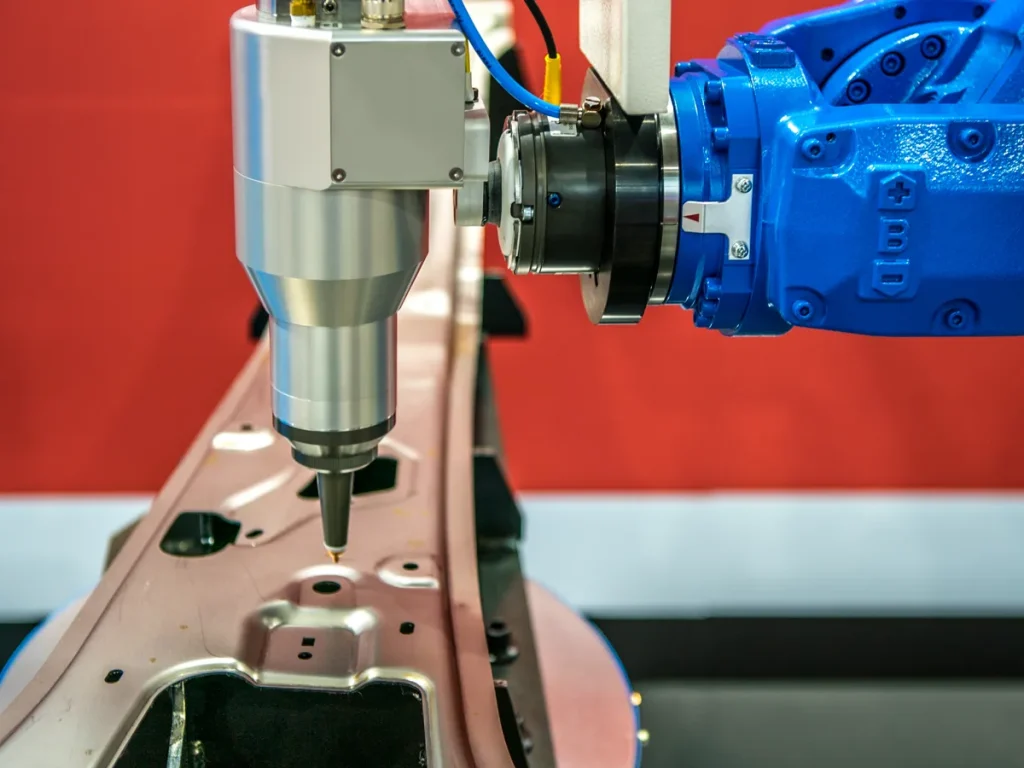
Die Integration von CNC in die Produktion basiert auf der CNC-Bearbeitung als subtraktives Fertigungsverfahren, bei dem ein Schneidwerkzeug anhand programmierter Werkzeugwege Material von einem Werkstück abträgt. In der Robotik wird die CNC-Bearbeitung zur Herstellung mechanischer Teile eingesetzt, die ihre Form auch unter Bewegung, Belastung und wiederholter Montage beibehalten müssen.
Der größte Vorteil der CNC-Bearbeitung für die Robotik liegt in der Präzision. Roboterteile benötigen häufig Löcher, Bohrungen, Aussparungen, Schlitze, Befestigungsflächen und Drehverbindungen, um zueinander ausgerichtet zu werden. Verschieben sich diese Merkmale, kann der Roboter an Wiederholgenauigkeit einbüßen, übermäßige Reibung verursachen oder Lasten in die falsche Richtung übertragen.
Die CNC-Bearbeitung eignet sich besonders für Prototypen und Kleinserien, da Konstruktionsänderungen oft durch CAD/CAM-Aktualisierungen statt durch den Einsatz spezieller Werkzeuge vorgenommen werden können. Dies unterstützt die Entwicklung maßgeschneiderter Roboter, bei denen sich Armlänge, Gelenkanordnung, Greiferdesign oder Sensorposition während der Testphase ändern können.
Wann CNC-Bearbeitung für Robotergelenke erforderlich ist
Bei Robotergelenken ist in der Regel eine CNC-Bearbeitung erforderlich, wenn das Bauteil die Drehung, die Lagerposition, die Motorausrichtung, den Zahneingriff oder die Lastübertragung steuert. Diese Merkmale sind sehr empfindlich, da sich kleine Fehler entlang des Roboterarms summieren können.
Ein Verbindungsbauteil muss möglicherweise CNC-bearbeitet werden, wenn es Folgendes enthält:
- Lagersitze oder Wellenbohrungen
- Befestigungsflächen für Motor und Getriebe
- Funktionen zur Zahnradausrichtung
- Löcher für Passstifte oder Präzisionspositionierungsmerkmale
- Befestigungsflächen für Sensoren
- Strukturelle Aussparungen, die das Gewicht reduzieren, aber die Steifigkeit gewährleisten müssen
- Passflächen zur Kontrolle der Rechtwinkligkeit oder Parallelität
Entscheidend ist, ob das Verbindungselement die Bewegungsgenauigkeit beeinflusst oder lediglich der allgemeinen Struktur dient. Bei einer nicht kritischen Abdeckung ist möglicherweise eine weniger strenge Kontrolle zulässig. Eine Lagerbohrung oder eine Zahnradverbindung erfordert in der Regel eine strengere Kontrolle, da sie die Bewegung direkt beeinflusst.
Warum Wiederholgenauigkeit bei der CNC-Bearbeitung für die Robotik wichtig ist
Wiederholgenauigkeit ist die Fähigkeit eines Roboters, bei gleichem Befehl immer wieder dieselbe Position anzusteuern. CNC-gefertigte Teile tragen zur Wiederholgenauigkeit bei, indem sie dafür sorgen, dass die mechanischen Schnittstellen von Teil zu Teil einheitlich bleiben.
Warum Wiederholgenauigkeit bei der CNC-Bearbeitung für die Robotik so wichtig ist, hängt mit der Toleranzsumme zusammen. Ein Roboterarm kann aus mehreren Gliedern, Gelenken, Wellen, Zahnrädern und Gehäusen bestehen. Jedes Teil mag für sich genommen in Ordnung sein, doch kleine Abweichungen können sich über die gesamte Baugruppe hinweg summieren. Wird die Toleranzsumme nicht kontrolliert, kann es zu Verschiebungen des Werkzeugmittelpunkts, der Greiferposition oder des Sensorblickfelds kommen.
Die Wiederholgenauigkeit wirkt sich auch auf Wartung und Austausch aus. Wird ein bearbeitetes Gelenkgehäuse später ausgetauscht, muss das neue Teil zu denselben Lagern, Motoren und Befestigungselementen passen, ohne dass die Baugruppe dabei aus der Ausrichtung gerät. Aus diesem Grund ist die Prüfplanung ebenso wichtig wie die Bearbeitung.
Wie sich enge Toleranzen auf die Leistung der Roboter-Montage auswirken
Enge Toleranzen sollten je nach Funktion und Kontrollart zugewiesen und nicht einheitlich angewendet werden. Maßgrenzen allein regeln nicht die Beziehungen zwischen den Merkmalen, sodass Dreh- und Positionierungsmerkmale möglicherweise Positions-, Rundlauf-, Rechtwinkligkeits- oder Ebenheitskontrollen erfordern, anstatt nur ±-Maße. Beispielsweise hängen Lager- und Wellenmerkmale von der Koaxialität und dem Rundlauf ab, während die Montageflächen von Motor und Getriebe von der Ebenheit und Rechtwinkligkeit abhängen, um die Ausrichtung unter der Vorspannung bei der Montage aufrechtzuerhalten.
In einer der angegebenen Quellen heißt es, dass CNC-Präzisionsbearbeitung kann bei Robotikanwendungen Toleranzen von etwa ±0,015 mm einhalten. Dieser Wert sollte als projektspezifisches Ziel und nicht als allgemeingültige Regel betrachtet werden. Er sollte unter Berücksichtigung des Materials, der Geometrie, der Maschineneinstellung, der Prüfmethode und der Leistungsfähigkeit des Lieferanten überprüft werden.
Engere Toleranzen führen oft zu höheren Kosten und längeren Durchlaufzeiten, da sie unter Umständen eine sorgfältigere Einrichtung, eine langsamere Bearbeitung, zusätzliche Prüfungen oder eine aufwendigere Endbearbeitung erfordern. Die Entscheidung sollte sich nach der Funktion richten. Eine Toleranz sollte nur dann enger gewählt werden, wenn dadurch die Bewegungsgenauigkeit, die Lebensdauer der Lager, der Zahnradkontakt oder die Ausrichtung der Baugruppe gewährleistet wird. Bei Zierabdeckungen, Freiräumen oder nicht positionierenden Flächen lohnt sich eine Engerlegung möglicherweise nicht.
Abbildung: Kommentierte Übersicht über Roboterkomponenten – Arme, Gelenke, Getriebe, Gehäuse, Greifer
Eine nützliche Übersicht über Roboterkomponenten sollte die Teile nach ihrer Funktion und nicht nur nach ihrer Form unterteilen:
| Roboterbereich | Typische Merkmale der CNC-Bearbeitung | Warum sie wichtig sind |
|---|---|---|
| Arme und Glieder | Taschen, Stirnflächen, Befestigungslöcher, Kabelführungen | Gewicht, Steifigkeit und Passgenauigkeit bei der Montage kontrollieren |
| Fugen | Lagerbohrungen, Motorlager, Getriebeschnittstellen | Drehung, Ausrichtung und Wiederholgenauigkeit steuern |
| Zahnräder | Zähne, Naben, Bohrungen, Keilnuten oder Passmerkmale | Steuerung der Drehmomentübertragung und der Laufruhe |
| Gehäuse | Befestigungsflächen, Abdeckungen, Innentaschen | Komponenten schützen und Baugruppen lokalisieren |
| Greifer | Finger, Backen, Adapter, Befestigungsplatten | Flexibilität bei der Kontaktierung der Steuerkomponenten und beim Umschalten |
| Sensorhalterungen | Kleine Löcher, Bezugsebenen, Halterungen | Sichtfeld und Messposition des Sensors steuern |
Diese Art von kommentierter Karte hilft Käufern bei der Entscheidung, welche Merkmale geprüft werden müssen und bei welchen Merkmalen Standard-Bearbeitungstoleranzen ausreichen.

Machbarkeit: Kann ein Roboterbauteil CNC-bearbeitet werden?
Die meisten Roboterkomponenten lassen sich CNC-bearbeiten, sofern die Geometrie den Zugang für das Werkzeug ermöglicht und das Material stabil bearbeitet werden kann. Probleme bei der Machbarkeit ergeben sich in der Regel durch dünne Wände, tiefe Aussparungen, innere Strukturen, scharfe Innenecken, lange, nicht abgestützte Abschnitte oder Toleranzanforderungen, die nicht mit der Konstruktion des Bauteils vereinbar sind.
Ein bearbeitbares Teil ist nicht nur eines, das sich zerspanen lässt. Es muss während der Bearbeitung auch sicher fixiert, nach der Bearbeitung geprüft und montiert werden können, ohne dass die Passteile mit Gewalt in ihre Position gedrückt werden müssen.
Konstruktionsaspekte bei CNC-gefertigten Roboterkomponenten
Bei der Konstruktion von robotergestützten Bearbeitungsverfahren und CNC-gefertigten Roboterkomponenten sollte die Funktion im Vordergrund stehen. Es sind die Oberflächen zu ermitteln, die für Bewegung, Belastung, Abdichtung, Befestigung oder Sensorik zuständig sind. Diese sollten als Hauptbezugspunkte und Prüfpunkte dienen.
Zu den wichtigen Konstruktionsprüfungen gehören:
- Ob die Schneidwerkzeuge alle Merkmale erreichen können
- Ob Innenecken einen realistischen Werkzeugradius zulassen
- Ob sich dünne Wände während der Bearbeitung verformen können
- Ob tiefe Taschen zu Vibrationen führen oder zu einer schlechten Spanabfuhr
- Ob Löcher aus zugänglichen Richtungen gebohrt werden können
- Ob Toleranzangaben an funktionale Bezugspunkte gebunden sind
- Ob das Teil eingespannt werden kann, ohne kritische Oberflächen zu beschädigen
Konstrukteure sollten es vermeiden, für jedes Merkmal enge Toleranzen festzulegen. Enge Toleranzen sollten nur für Schnittstellen vorgesehen werden, die die Bewegung, die Ausrichtung oder die Montage beeinflussen. Dadurch lässt sich das Bauteil leichter fertigen und prüfen.
Wie sich die Befestigungsmerkmale von Sensoren auf die Bearbeitung von Roboterteilen auswirken
Sensorhalterungen können die Bearbeitung erschweren, da sie häufig kleine Bohrungen, präzise Flächen und eingeschränkten Zugang vereinen. Kameras, Drehgeber, Näherungssensoren und Kraftsensoren müssen unter Umständen in einer genau definierten Position relativ zum Gelenk, Greifer oder Endeffektor angebracht werden.
Inwiefern sich die Befestigungsmerkmale von Sensoren auf die Bearbeitung von Roboterteilen auswirken, hängt von ihrer Position und ihrer Toleranz ab. Die Befestigung einer Sensorhalterung an einer offenen Fläche kann unkompliziert sein. Eine Sensoraufnahme im Inneren eines Gelenkgehäuses erfordert möglicherweise längere Werkzeuge, mehrere Rüstvorgänge oder einen speziellen Zugang für die Prüfung.
Das Hauptrisiko ist eine Fehlausrichtung der Bezugspunkte. Wenn die Sensorhalterung in einer Aufspannung bearbeitet wird, die Verbindungsbohrung jedoch in einer anderen, kann sich die relative Position verschieben, sofern nicht beide Merkmale im Aufspannplan berücksichtigt werden. Bei sensorgesteuerten Robotern kann dies zu Kalibrierungsproblemen führen, selbst wenn jedes einzelne Merkmal seine eigene Maßtoleranz einhält.
Herausforderungen bei der Bearbeitung von leichten Robotergelenk-Komponenten
Leichte Roboterlenker reduzieren die bewegte Masse, sind jedoch unter Umständen schwer zu bearbeiten. Die Herausforderungen bei der Bearbeitung von leichten Roboterlenkerkomponenten ergeben sich häufig aus dünnen Wänden, großen Spannweiten und Aussparungen zur Gewichtsreduzierung.
Dünne Abschnitte können beim Schneiden in Schwingungen geraten. Lange Verbindungsstücke lassen sich unter Umständen nur schwer verformungsfrei halten. Große Aussparungen können die Steifigkeit verringern, sodass sich das Bauteil während der Bearbeitung oder später unter Belastung verschieben kann. Diese Probleme können sich auf die Ebenheit, die Lage der Bohrungen und die Ausrichtung der Passflächen auswirken.
Ein praktischer Konstruktionsansatz besteht darin, Gewicht nur dort zu reduzieren, wo dadurch keine kritischen Lastpfade geschwächt werden. Konstrukteure sollten außerdem prüfen, ob das Bauteil in einer stabilen Bearbeitungsreihenfolge gefertigt werden kann. Wenn die endgültige Geometrie zu flexibel wird, bevor alle kritischen Merkmale fertiggestellt sind, wird die Toleranzkontrolle erschwert, was den kontinuierlichen Betrieb der Maschinen einschränkt.
Checkliste: Prüfung der CNC-Eignung hinsichtlich Geometrie, Zugänglichkeit, Material und Passgenauigkeit der Baugruppe
| Bereich überprüfen | Was ist zu prüfen? | Entscheidungsrisiko |
|---|---|---|
| Geometrie | Dünne Wände, tiefe Vertiefungen, scharfe Innenecken, versteckte Merkmale | Probleme beim Werkzeugzugang oder bei der Durchbiegung |
| Werkstückträger | Flache Spannflächen, stabiles Werkstück, Einrichtungsablauf | Teilweise Verschiebung oder Verzerrung |
| Material | Bearbeitbarkeit, Festigkeitsanforderungen, Gewichtsvorgabe | Mangelhafte Oberflächenbeschaffenheit oder zu hohe Masse |
| Toleranz | Funktionsbezugspunkte, Lagerpassungen, Zahnradausrichtung, Sensorposition | Fehlausrichtung oder hoher Prüfungsaufwand |
| Passung bei der Montage | Passflächen, Befestigungselemente, Dübel, Kabelführungen | Nacharbeit während der Montage |
| Inspektion | Zugang für Messungen, definierte kritische Maße | Nicht verifizierte wesentliche Merkmale |
| Iteration | Nach den Tests zu erwartende Konstruktionsänderungen | Höhere Kosten, wenn das Design nicht modular ist |
Diese Checkliste sollte vor der Angebotserstellung oder der Freigabe zur Produktion ausgefüllt werden, insbesondere bei Verbindungsstücken, Armen und Präzisionsgehäusen.
So funktioniert die CNC-Bearbeitung von Roboterteilen
Die CNC-Bearbeitung von Roboterteilen beginnt mit der CAD-Geometrie. Die CAM-Software wandelt den Entwurf in Werkzeugwege um. Diese Werkzeugwege werden in Maschinenbefehle umgewandelt, die oft als G-Code bezeichnet werden. Die Maschine fräst dann das Teil, woraufhin durch eine Prüfung festgestellt wird, ob das Teil die geforderten Maße erfüllt.
Im Bereich der Robotik sollte der Prozess Rückmeldungen zur Montage beinhalten. Wenn ein Gelenk klemmt, ein Zahnrad einen schlechten Kontakt aufweist oder ein Sensor kalibriert werden muss, sollten diese Rückmeldungen mit dem CAD-Modell und dem Toleranzplan verknüpft werden.
Vergleich von CNC-Drehen und -Fräsen bei der Fertigung von Roboterteilen
Ein Vergleich von CNC-Drehen Die Bearbeitung von Roboterteilen durch Fräsen beginnt mit der Form des Teils. Das Drehen wird für Teile verwendet, die sich während der Bearbeitung um eine Achse drehen. Das Fräsen wird für prismatische, plattenförmige, mit Aussparungen versehene oder mehrseitige Teile verwendet.
| Prozess | Gängige Roboterteile | Beste Passform | Hauptgrenzen |
|---|---|---|---|
| CNC-Drehen | Wellen, Buchsen, Distanzstücke, runde Naben | Runde oder achsensymmetrische Merkmale | Weniger geeignet für komplexe Außentaschen |
| CNC-Fräsen | Verbindungsstücke, Gehäuse, Greiffinger, Halterungen, Gelenkplatten | Flache Flächen, Taschen, Schlitze, Lochmuster | Der Werkzeugzugang und die Anzahl der Einstellungen können die Geometrie einschränken |
| Kombiniertes Drehen und Fräsen | Zahnradnaben, Verbindungswellen mit Abflachungen oder Bohrungen | Teile mit sowohl runden als auch gefrästen Merkmalen | Es ist eine gründlichere Planung hinsichtlich der Bezugssysteme und der Prüfung erforderlich |
Die Maschinenklasse sollte sich nach dem Merkmalssatz richten, nicht nur nach der Teilebezeichnung. Einfache prismatische Teile eignen sich möglicherweise für die 3-Achs-Bearbeitung, die indexierte 4-Achs-Bearbeitung kann das Umspannen bei mehrseitigen Merkmalen reduzieren, und der Einsatz der 5-Achs-Bearbeitung ist oft gerechtfertigt, wenn zusammengesetzte Flächen, schräge Bohrungen oder schwer zugängliche Merkmale an dieselbe Bezugsstruktur gebunden bleiben müssen. Jede zusätzliche Einrichtung erhöht das Risiko von Positionsabweichungen; daher sollten Einkäufer erfragen, ob kritische Merkmale in einer einzigen Aufspannung oder durch kontrollierte Bezugspunktübertragungen gefertigt und geprüft werden können.
Oft geht es nicht darum, sich für das eine oder das andere Verfahren zu entscheiden. Viele Roboterteile erfordern sowohl gedrehte als auch gefräste Merkmale. Wichtig ist, festzulegen, welche Merkmale die Ausrichtung bestimmen, und diese Merkmale an einen klaren Bezugspunktplan zu binden.
Wie maßgefertigte Zahnräder die Bewegungssteuerung von Robotern verbessern
Maßgefertigte Getriebe kommen zum Einsatz, wenn Standardgetriebe den Anforderungen des Roboters hinsichtlich Platzbedarf, Bewegung, Belastung oder Integration nicht gerecht werden. Inwiefern maßgefertigte Getriebe die Bewegungssteuerung von Robotern verbessern, hängt von der Rolle des Getriebes bei der Drehmomentübertragung und der Positionsreaktion ab.
Ein maßgeschneidertes Getriebe kann erforderlich sein, wenn ein Robotergelenk einen kompakten Einbauraum, eine nicht standardmäßige Wellengröße, ein spezielles Befestigungsmuster oder ein erforderliches Übersetzungsverhältnis aufweist, das mit Standardteilen nicht abgedeckt werden kann. Die CNC-Bearbeitung kann die Entwicklung maßgeschneiderter Getriebe unterstützen, insbesondere bei Prototypen und Kleinserien, bei denen der Einsatz spezieller Werkzeuge möglicherweise nicht praktikabel ist.
Das größte Konstruktionsrisiko liegt nicht nur in der Zahngeometrie. Auch die Ausrichtung der Zahnradbohrung, die Nabengeometrie, die Befestigungsflächen und die Gegenstücke beeinflussen die Bewegung. Selbst ein präzise gefertigtes Zahnrad kann eine schlechte Leistung erbringen, wenn das Gehäuse, die Welle oder die Lageranordnung zu einer Fehlausrichtung führen.
Wie elektrische Greifer flexible CNC-Roboter-Konfigurationen unterstützen
Elektrische Greifer ermöglichen flexible CNC-Roboterkonfigurationen, da sie für unterschiedliche Werkstückgrößen programmiert werden können und neben Be- und Entladevorgängen auch routinemäßige Arbeitsabläufe an der Maschine vollständig automatisieren. Dies ist von Vorteil, wenn eine Bearbeitungszelle verschiedene Werkstücke statt nur eines festen Produkts verarbeitet.
Bei Standardbearbeitungen und CNC-Bearbeitungen werden elektrische Greifer häufig mit pneumatischen Greifern verglichen, da durch ihre Programmierbarkeit der Bedarf an Sonderwerkzeugen reduziert werden kann. Dies ist bei der Bearbeitung mit großer Produktvielfalt von Bedeutung, bei der häufige Werkstückwechsel zu längeren Rüstzeiten führen können.
Aus Sicht der Bauteilkonstruktion ergeben sich bei Greifern ganz eigene Anforderungen an die Bearbeitung. Greiferfinger, Adapterplatten und Befestigungsblöcke müssen unter Umständen CNC-bearbeitet werden, um sie an die Werkstückform und die Roboterschnittstelle anzupassen. Diese Teile sollten hinsichtlich der Oberflächenbeschaffenheit der Kontaktflächen, der Zugänglichkeit für Befestigungselemente und der Wiederholgenauigkeit der Positionierung überprüft werden.
Prozessdiagramm: CAD/CAM, G-Code, Bearbeitung, Prüfung, Rückmeldung zur Montage
Ein praktisches Prozessdiagramm für Roboterteile sollte fünf miteinander verbundene Phasen umfassen:
- CAD-Modell- und Funktionsprüfung: Es werden kritische Schnittstellen identifiziert, darunter Gelenke, Lager, Getriebe, Sensoren und Befestigungsflächen.
- CAM-Programmierung und G-Code-Ausgabe: Die Werkzeugwege werden unter Berücksichtigung von Material, Geometrie, Aufspannung und geforderter Oberflächengüte erstellt.
- Bearbeitungs- und Einrichtungssteuerung Das Werkstück wird bearbeitet, während die Werkstückspannung, der Werkzeugzugang und die Reihenfolge der Bearbeitungsschritte gesteuert werden.
- Prüfung: Die kritischen Maße werden anhand der Zeichnung oder der modellbasierten Definition gemessen.
- Rückmeldung zur Montage: Die Ergebnisse hinsichtlich Passgenauigkeit, Bewegung und Ausrichtung werden vor dem nächsten Konstruktions- oder Produktionsdurchlauf überprüft.
Diese Schleife ist wichtig, da sich Robotik-Teile nach Bewegungstests häufig ändern.
Werkstoffe für Roboterarme, Gelenke, Verbindungsglieder und Gehäuse
Die Wahl des Werkstoffs wirkt sich auf Gewicht, Steifigkeit, Bearbeitungsverhalten, Oberflächengüte und Kosten aus. Die vorliegende Untersuchung identifiziert Stahl, Aluminium und Kunststoffe als gängige Werkstoffe für CNC-bearbeitete Roboterteile. Jede Werkstoffgruppe erfüllt unterschiedliche mechanische Anforderungen.
Aluminium wird häufig für Leichtbaukonstruktionen in Betracht gezogen. Stahl kann dort zum Einsatz kommen, wo eine höhere Belastbarkeit oder Verschleißfestigkeit erforderlich ist. Kunststoffe können je nach mechanischer Beanspruchung für Abdeckungen, Teile mit geringer Belastung, Isolierelemente oder gewichtskritische Komponenten verwendet werden.
Die besten Werkstoffe für leichte Roboterarmglieder
Die besten Werkstoffe für leichte Roboterarmglieder werden in der Regel unter Abwägung von Masse, Steifigkeit, Festigkeit und Bearbeitbarkeit ausgewählt. Aluminium ist eine gängige Wahl für Armglieder, da es zur Gewichtsreduzierung beiträgt und gleichzeitig die CNC-Bearbeitung von Aussparungen, Befestigungsflächen und Lochmustern ermöglicht.
Kunststoffe können auch für Bauteile mit geringer Belastung oder nichttragende Bauteile in Betracht gezogen werden, bei denen das Gewicht eine entscheidende Rolle spielt. Ihr Einsatz sollte im Hinblick auf Belastungs-, Wärme-, Verschleiß- und Befestigungsanforderungen geprüft werden. Stahl ist für leichte Verbindungselemente weniger attraktiv, wenn die bewegte Masse die Hauptbeschränkung darstellt, kann jedoch in kompakten Bereichen mit hoher Belastung weiterhin erforderlich sein.
Die Entscheidung sollte davon abhängen, wie sich das Gelenk bewegt. Ein langes Gelenk, das sich schnell bewegt, profitiert möglicherweise von einem geringeren Gewicht. Ein kurzes Gelenkteil, das hohen Kräften ausgesetzt ist, erfordert möglicherweise ein festeres oder steiferes Material, auch wenn dies zu einer höheren Masse führt.
Die Wahl zwischen den Aluminiumlegierungen 6061 und 7075 für Roboterteile
Die Materialauswahl hängt vom Lastverlauf, der Umgebung, der Befestigungsart, den Verschleißstellen und der geplanten Oberflächenbehandlung ab. Bei Aluminiumteilen sind die Korrosionsbelastung, die Ermüdungsempfindlichkeit, die Gewindebeständigkeit, die Notwendigkeit von Gewindeeinsätzen in Gewindebohrungen, galvanische Kontakte mit Stahlbefestigungselementen sowie mögliche Auswirkungen von Eloxierung oder anderen Oberflächenbehandlungen auf passgenaue Merkmale zu prüfen. Wenn das Teil wiederholten Klemmkräften, Gleitkontakt oder hohen lokalen Lagerbelastungen ausgesetzt ist, muss vor der Freigabe sichergestellt werden, dass die ausgewählte Legierung und Oberflächenbehandlung diesen Anforderungen standhalten.
Basierend auf dem ASM International, die Auswahl sollte nicht allein anhand der Legierungsbezeichnung erfolgen. Käufer sollten Folgendes überprüfen:
- Erforderliche Festigkeit und Steifigkeit
- Erwartete Belastung und Bewegungszyklus
- Bearbeitungsstabilität bei dünnen Querschnitten
- Anforderungen an die Oberflächenbeschaffenheit
- Befestigungs- und Einsteckstrategie
- Prüfvorschriften für kritische Merkmale
- Auswirkungen auf Verfügbarkeit und Lieferzeit
Entscheidend ist, dass die Wahl der Legierung sowohl die Zerspanbarkeit als auch die Leistungsfähigkeit des Roboters gewährleistet.
Vorteile von 7075-Aluminium für Roboterarmkomponenten: Was zu prüfen ist
Leichte Gelenkkomponenten aus 7075-Aluminium bieten entscheidende Vorteile für Roboterarmkomponenten, die in gewichtskritischen Konstruktionsanwendungen zum Einsatz kommen. Das Ziel der Konstruktion ist es, den Arm leicht zu halten und gleichzeitig eine ausreichende Festigkeit für Bewegung und Belastung zu gewährleisten.
Vor der Auswahl sollten die Teams prüfen, ob der Vorteil tatsächlich für das jeweilige Bauteil gilt. Ein festeres Material behebt keine Mängel wie eine schlechte Geometrie, schwache Lastpfade oder nicht abgestützte dünne Wände. Es kann sich zudem auf die Bearbeitungsstrategie, die Endbearbeitung, die Prüfung und die Beschaffung auswirken.
Die Validierung sollte eine Belastungsprüfung, eine Montageprüfung und einen Prototypentest umfassen, wenn das Bauteil Auswirkungen auf die Sicherheit, die Bewegungsgenauigkeit oder die Lebensdauer hat. Dies ist insbesondere für Armglieder, Gelenkplatten und Greiferkonstruktionen von Bedeutung.
Einschränkungen bei der Verwendung von Aluminium für hochbelastete Roboterkomponenten
Aluminium stößt bei hochbelasteten Roboterkomponenten an seine Grenzen. Es ist möglicherweise nicht die beste Wahl, wenn das Bauteil konzentrierten Belastungen, wiederholten Stößen, hohen Lagerbelastungen oder Verschleiß an den Kontaktflächen ausgesetzt ist.
Die Einschränkungen von Aluminium bei hochbelasteten Roboterkomponenten treten häufig an Schnittstellen auf: Lagersitze, Wellenlagerungen, Getriebehalterungen, Gewindebohrungen und Kontaktpunkte von Greifern. Die Konstruktion erfordert unter Umständen Einsätze, größere Lagerflächen, eine andere Geometrie oder einen anderen Werkstoff.
Wenn das Bauteil belastungskritisch ist, sollte die Materialauswahl unter Berücksichtigung der gesamten Baugruppe überprüft werden. Ein einzelnes Aluminiumbauteil mag zwar den Anforderungen seiner Zeichnung entsprechen, doch kann der Roboter dennoch ausfallen, wenn die Gelenkbaugruppe nicht steif genug ist.

Vorteile und Einschränkungen der CNC-Bearbeitung in der Robotik
In der modernen Fertigungsindustrie ermöglicht die CNC-Bearbeitung Ingenieuren eine präzise Steuerung der Geometrie, der Oberflächenbeschaffenheit und der Materialauswahl. Sie eignet sich besonders für Sonderanfertigungen, Prototypen und Serienbauteile, bei denen Passgenauigkeit und Wiederholbarkeit entscheidend sind.
Auch die Einschränkungen sind von Bedeutung. Bei der CNC-Bearbeitung wird Material abgetragen, daher muss die Geometrie des Bauteils den Zugang für das Werkzeug ermöglichen. Die Kosten können steigen, wenn Bauteile zahlreiche Umrüstungen, enge Toleranzen an vielen Oberflächen, komplexe Prüfungen oder schwierige Werkstoffe erfordern. Außerdem ersetzt dies nicht die Notwendigkeit einer soliden mechanischen Konstruktion.
CNC-Bearbeitung vs. Roboterfräsen: Präzision, Steifigkeit, Flexibilität und Kostenabwägungen
Das Fräsen mit Robotern kann Flexibilität bei großen oder weniger anspruchsvollen Arbeiten bieten und ermöglicht es den Bedienern, Werkzeugmaschinen bei der Fertigung komplexer Teile ohne manuelles Eingreifen zu steuern. Diese Eigenschaften hängen von der Steifigkeit, der thermischen Stabilität und einer vorhersehbaren Werkzeugsteuerung ab, die spezielle CNC-Maschinen in der Regel zuverlässiger gewährleisten. Die Wahl des Verfahrens sollte sich nach der Kategorie der kritischen Merkmale richten und nicht nach einer allgemeinen Annahme bezüglich der Automatisierung.
Die vorgelegte Studie weist auf eine wichtige Unsicherheit hin: Roboter können zwar hinsichtlich Steifigkeit und Präzision im Mikrometerbereich noch nicht mit CNC-Maschinen mithalten, bieten jedoch Kostenvorteile, Anpassungsfähigkeit und einen hohen Nutzen für die Prototypenentwicklung oder weniger anspruchsvolle Aufgaben. Das bedeutet, dass das Fräsen mit Robotern je nach Aufgabe bewertet und nicht als direkter Ersatz betrachtet werden sollte.
| Faktor | CNC-Bearbeitung | Roboterfräsen |
|---|---|---|
| Präzisionsbedarf | Bessere Eignung für Funktionen mit hoher Kontrollstufe | Eignet sich besser für weniger starre Aufgaben oder umfangreichere, flexible Arbeiten |
| Steifigkeit | Robustere Maschinenkonstruktion | Geringere Steifigkeit in vielen Konfigurationen |
| Flexibilität | Durch Programmierung und Vorrichtungsbau | Große Reichweite und Flexibilität bei der Wegführung |
| Kostenverhalten | Die Komplexität der Einrichtung und Bearbeitung treibt die Kosten in die Höhe | Kann bei bestimmten flexiblen oder umfangreichen Aufgaben zu Kosteneinsparungen führen |
| Beste Verwendung | Gelenke, Zahnräder, Gehäuse, Präzisionsschnittstellen | Großflächiges Fräsen, Besäumen und mit der Prüfung verbundene Aufgaben |
Bei Roboterkomponenten, die die Ausrichtung von Lagern oder den Zahneingriff von Zahnrädern steuern, ist die herkömmliche CNC-Bearbeitung oft der sicherere Ausgangspunkt.
Umprogrammierbare und modulare CNC-Roboter für Kleinserien und Sonderanfertigungen
Reprogrammierbare und modulare CNC-Roboter eignen sich hervorragend für die Automatisierung der CNC-Maschinenbeschickung und sind besonders dort von Nutzen, wo sich das Produktsortiment häufig ändert. Die vorgestellten Forschungsergebnisse bringen diese Systeme mit reduzierten Ausfallzeiten, einem geringeren Bedarf an Sonderwerkzeugen und einer Entlastung bei Fachkräftemangel in Verbindung.
Bei der Fertigung von Robotik-Bauteilen spielt dies vor allem bei der Prototypenentwicklung und bei Kleinserien eine wichtige Rolle. Ein Betrieb muss unter Umständen mehrere Varianten eines Greiffingers, einer Verbindungsplatte oder eines Gehäuses bearbeiten, während sich das Roboterdesign noch im Wandel befindet. Reprogrammierbare Systeme können diese Art der Iteration unterstützen.
Der Käufer sollte dennoch prüfen, ob die Anlagen des Lieferanten die erforderlichen Toleranzen einhalten können. Flexibilität ist zwar nützlich, ersetzt jedoch weder die Konstruktion von Spannvorrichtungen noch die Prüfplanung oder die Materialkontrolle.
KI, maschinelles Lernen und cloudbasierte CNC-Programmierung in der Roboterfertigung
KI und maschinelles Lernen werden in der CNC-Robotik eingesetzt, um Entscheidungshilfen in Echtzeit, vorausschauende Wartung, Prozessoptimierung und eine einfachere Programmierung zu ermöglichen. Cloud-basierte CNC-Programmierung kann den Fernzugriff, die Zusammenarbeit, die Datensicherheit und die Analyse von Leistungstrends standortübergreifend unterstützen.
Für einen Käufer liegt der praktische Nutzen nicht im Namen der Software. Der Nutzen besteht vielmehr darin, ob Programmierung, Prüfdaten und Prozessrückmeldungen dazu beitragen, Fehler zu reduzieren und die Wiederholgenauigkeit zu verbessern. So können beispielsweise Trenddaten dabei helfen, Werkzeugverschleiß, Maschinenabweichungen oder Prozessänderungen zu erkennen, bevor sie sich auf eine Charge von Roboterteilen auswirken.
Diese Werkzeuge sollten als Prozessunterstützung betrachtet werden. Sie ersetzen jedoch nicht die Notwendigkeit klarer Zeichnungen, kontrollierter Bezugspunkte und festgelegter Prüfkriterien.
Gesucht: Branchenberichte zu Trends in der CNC-Robotik-Automatisierung
Die CNC-Robotik verändert die Arbeitsabläufe in der Fertigung, und für einige Trendprognosen in diesem Bereich sind fundiertere Belege auf Branchenebene erforderlich, bevor sie für die Investitionsplanung herangezogen werden können. Die vorgelegten Forschungsergebnisse deuten auf ein Wachstum in den Bereichen KI, Cloud-Programmierung, elektrische Greifer, Schwarmrobotik sowie Anwendungen außerhalb der Automobil- und Luftfahrtindustrie hin. In einigen Bereichen fehlen jedoch quantifizierte Einführungsraten oder Leistungsbenchmarks.
Dies ist für die Entscheidungsfindung von Bedeutung. Ein Konstruktionsteam kann diese Trends als Orientierung für die zukünftige Planung nutzen, sollte jedoch nicht davon ausgehen, dass jeder Lieferant oder jede Produktionsstätte über die gleichen Automatisierungsmöglichkeiten verfügt. Bevor Sie sich auf eine Automatisierungsmethode verlassen, sollten Sie den tatsächlichen Prozess, die Prüfverfahren und die bisherigen Toleranzwerte für ähnliche Bauteile überprüfen.
Häufige Fehler, Risiken und Qualitätsprobleme
Roboterteile versagen häufig an Schnittstellen und nicht inmitten einfacher Geometrien. Bohrungen, Befestigungsflächen, Getriebeteile, Sensorhalterungen, Befestigungselemente und Übergänge zu dünnen Wänden verdienen besondere Aufmerksamkeit.
Zu den üblichen Risiken zählen Fehlausrichtung, schlechte Oberflächengüte, Verformung der Bauteile, Toleranzkumulierung und Verschleiß an den Kontaktflächen. Viele dieser Risiken lassen sich verringern, indem die Konstruktionsvorgaben mit der Fertigung und der Prüfung verknüpft werden.
Was führt zu Fehlausrichtungen bei den Gelenkkomponenten von Roboterarmen?
Die Ursachen für Fehlausrichtungen bei Gelenkkomponenten von Roboterarmen sind in der Regel auf eine Kombination aus Konstruktions-, Fertigungs- und Montagefaktoren zurückzuführen. Eine Bohrung kann leicht versetzt sein. Eine Befestigungsfläche ist möglicherweise nicht eben genug. Ein Getriebe oder ein Lager wird möglicherweise durch Befestigungselemente in Position gedrückt. Kleine Fehler können sich über das gesamte Gelenk hinweg summieren.
Zu den häufigsten Ursachen zählen:
- Datum-Funktionen, die nicht mit der Baugruppenfunktion übereinstimmen
- Mehrere Konfigurationen ohne ausreichende Standortkontrolle
- Lagerbohrungen und Motorlager, die aus verschiedenen Werkstücken gefertigt wurden
- Dünne Schnitte, die sich während der Bearbeitung verschieben
- Befestigungslöcher, die als Passmerkmale verwendet werden, ohne dass eine angemessene Kontrolle erfolgt
- Merkmale des Zahnrads oder der Welle, die nicht auf die Verbindungsachse ausgerichtet sind
Eine Fehlausrichtung kann sich durch Festlaufen, Überhitzung, Geräuschentwicklung, mangelnde Wiederholgenauigkeit oder ungleichmäßigen Zahnradverschleiß äußern.
Häufige Fehlerquellen bei Präzisionsbauteilen für Roboterarme
Zu den häufigen Schwachstellen bei Präzisionsbauteilen für Roboterarme zählen Gelenkschienen, Befestigungspunkte, Lagersitze, Getriebehalterungen, Greiferfinger und Sensorhalterungen. Diese Bereiche sind Belastungen, Bewegungen, Montagebeanspruchungen oder Kalibrierungsempfindlichkeiten ausgesetzt.
Fehler können mechanischer oder funktionaler Natur sein. Ein Bauteil muss nicht unbedingt reißen, kann aber dennoch ausfallen, indem es zu viel Spiel zulässt, seine Ausrichtung verliert oder dazu führt, dass der Roboter die Position verfehlt. Aus diesem Grund sollte sich die Prüfung auf Merkmale konzentrieren, die die Bewegung und die Montage beeinflussen, und nicht nur auf sichtbare Mängel.
Risiken einer schlechten Oberflächenbeschaffenheit bei Bauteilen für Robotergelenke
Die Oberflächenbeschaffenheit sollte der Funktion der Schnittstelle entsprechen. Lagersitze und Positionierebenen erfordern ein stabiles Sitzverhalten, Gleitflächen benötigen eine für Reibung und Verschleiß geeignete Oberflächenbeschaffenheit, Dichtflächen erfordern einen gleichmäßigen Kontakt, Kontaktflächen von Greifern benötigen unter Umständen eine kontrollierte Struktur, um Halt zu bieten, ohne das Bauteil zu beschädigen, und Sensor-Montageflächen sollten Welligkeiten vermeiden, die die Ausrichtung oder Messung beeinträchtigen. Die Oberflächenbeschaffenheit ist daher eine Anforderung an die Leistungsfähigkeit der Baugruppe und nicht nur eine ästhetische Anforderung.
Eine schlechte Oberflächenbeschaffenheit an einem Lagersitz, einem Wellenelement oder einer Passfläche kann die Lastverteilung verändern. Außerdem kann sie dazu führen, dass sich die Baugruppe zu fest oder zu locker anfühlt, selbst wenn die Maßangaben akzeptabel erscheinen. Die Anforderungen an die Oberflächenbeschaffenheit sollten daher je nach Funktion festgelegt und in Zeichnungen und Spezifikationen ausdrücklich angegeben werden. Basierend auf ISO 1302, werden die Anforderungen an die Oberflächenstruktur in der technischen Produktdokumentation durch standardisierte grafische Symbole und textliche Angaben vermittelt – ohne diese Angaben besteht die Gefahr, dass die beabsichtigte Oberflächenbeschaffenheit zwischen Konstruktions- und Fertigungsteams oder zwischen Käufer und Lieferant nicht einheitlich interpretiert wird.
Faktoren, die die Toleranz bei CNC-gefertigten Roboterteilen beeinflussen
Zu den Faktoren, die die Toleranz bei CNC-gefertigten Roboterteilen beeinflussen, zählen Geometrie, Werkstoff, Werkzeugzugang, Anzahl der Rüstvorgänge, Werkstückspannung, Werkzeugverschleiß, thermische Einflüsse und Prüfverfahren. Dünnwandige Teile und tiefe Aussparungen lassen sich schwieriger spannen als kompakte Blöcke. Mehrere Rüstvorgänge können zu größeren Abweichungen zwischen den einzelnen Merkmalen führen.
Auch das Material spielt eine Rolle. Ein Material, das sich während der Bearbeitung verschiebt, kann die Kontrolle der Endmaße erschweren. Ein Werkstück, das sich nicht leicht prüfen lässt, kann versteckte Risiken bergen, selbst wenn der Bearbeitungsprozess stabil ist.
Bei der Toleranzplanung sollte der Schwerpunkt auf der Funktion liegen. Wenn ±0,015 mm in Betracht gezogen werden, sollte überprüft werden, ob das Merkmal dieses Maß an Kontrolle erfordert und ob der Bearbeitungs- und Prüfplan dies gewährleisten kann.
Kosten-, Toleranz- und Vorlaufzeit-Faktoren
Kosten, Toleranzen und Durchlaufzeiten hängen miteinander zusammen. Ein Konstruktionsentwurf mit vielen eng bemessenen Merkmalen erfordert möglicherweise mehr Rüstvorgänge, langsamere Schnittgeschwindigkeiten, zusätzliche Prüfungen und mehr Überprüfungen. Ein einfacherer Konstruktionsentwurf mit eindeutigen Bezugspunkten lässt sich möglicherweise schneller bearbeiten und prüfen.
Im Bereich der Robotik sollte die Kostenentscheidung auch den Iterationsprozess berücksichtigen. Ein Prototypenteil, dessen Bearbeitung zwar kostengünstig, dessen Modifizierung jedoch schwierig ist, kann das Projekt verlangsamen. Ein modulares Teiledesign mag zwar höhere Stückkosten verursachen, verringert jedoch das Risiko einer Neukonstruktion.
Kostentreiber bei der kundenspezifischen CNC-Bearbeitung für die Robotik
Zu den Kostenfaktoren bei der kundenspezifischen CNC-Bearbeitung für die Robotik zählen Material, Bauteilgröße, geometrische Komplexität, Toleranzniveau, Anzahl der Rüstvorgänge, Oberflächengüte und Prüfanforderungen.
Zu den wichtigsten Kostenfaktoren zählen:
- Lange Bearbeitungszeit aufgrund tiefer Taschen oder großem Materialabtrag
- Enge Toleranzen bei vielen Merkmalen
- Verschiedene Einstellungen, um unterschiedliche Gesichter zu erreichen
- Schwierige Werkstückspannung
- Hoher Prüfungsaufwand
- Verfügbarkeit von Material
- Veredelungsbedarf
- Änderungen am Entwurf zwischen den Iterationen
Maßgefertigte Roboterteile sind oft teurer, wenn das Design noch nicht ausgereift ist. Befindet sich der Roboter noch in der Testphase, sollten Käufer damit rechnen, dass sich weitere Entwicklungsschritte auf die Kosten und den Zeitplan auswirken.
Wie sich das Gewicht von Bauteilen auf die Leistung von Industrierobotern auswirkt
Der Einfluss des Bauteilgewichts auf die Leistung von Industrierobotern hängt mit der bewegten Masse zusammen. Schwerere Arme, Gelenke, Greifer und Endeffektoren können sich auf die Beschleunigung, die Nutzlast, den Energiebedarf und das dynamische Ansprechverhalten auswirken. Die vorgestellten Forschungsergebnisse sprechen für den Einsatz von Materialien wie Aluminium und Kunststoffen, wenn eine Leichtbauweise erforderlich ist.
Bei der Gewichtsreduzierung darf die erforderliche Steifigkeit nicht beeinträchtigt werden. Ein leichteres Gelenk, das sich zu stark verbiegt, kann die Wiederholgenauigkeit beeinträchtigen. Ein leichterer Greiffinger, der sich abnutzt oder verbiegt, kann zu Handhabungsfehlern führen. Das Konstruktionsziel ist nicht allein das minimale Gewicht. Es geht um eine sinnvolle Gewichtsreduzierung ohne Funktionseinbußen.
Toleranzplanung: Wann ±0,015 mm entscheidend sein können und wann die Anforderungen zu überprüfen sind
Eine Toleranz von etwa ±0,015 mm kann bei Lagerpassungen, Präzisionsbohrungen, Zahnradanschlüssen, der Wellenausrichtung und sensorbezogenen Bezugspunkten von Bedeutung sein. Sie kann auch dann eine Rolle spielen, wenn mehrere Roboterachsen übereinander angeordnet sind und kleine Fehler die endgültige Position des Werkzeugs oder Greifers beeinflussen können.
Diese Toleranz sollte vor der Anwendung überprüft werden. Der angegebene Wert stammt aus einer einzigen Quelle und sollte daher nicht als Standardwert betrachtet werden. Es ist zu prüfen, ob das Merkmal tatsächlich Auswirkungen auf die Bewegung hat, ob Material und Geometrie die Toleranz einhalten können und ob dies durch eine Prüfung nachgewiesen werden kann.
Für weniger kritische Merkmale ist dieses Maß an Kontrolle möglicherweise nicht erforderlich. Durchgangsbohrungen, Aussparungen zur Gewichtsreduzierung, Abdeckungen und nicht positionierende Flächen können oft weniger strenge Anforderungen erfüllen, sofern sie die Montage oder die Bewegung nicht beeinträchtigen.
Tabelle: Faktoren zu Kosten, Toleranz, Material, Einrichtung, Prüfung und Iteration
| Faktor | Was den Schwierigkeitsgrad erhöht | Was zu überprüfen ist |
|---|---|---|
| Kosten | Komplexe Geometrie, enge Toleranzen, schwieriges Material, zusätzliche Nachbearbeitung | Welche Funktionen sind wirklich entscheidend? |
| Toleranz | Dünne Wände, verschiedene Aufbauten, lange Werkzeuge, instabiles Material | Datenstruktur und Zugriffsrechte |
| Material | Gewichtsvorgabe, Belastungsanforderung, Bearbeitbarkeit, Verfügbarkeit | Eignung für Bewegung und Montage |
| Einrichtung | Vielseitige Merkmale, schwer zu spannende Formen | Werkstückspannung und Bearbeitungsreihenfolge |
| Inspektion | Verdeckte Bohrungen, tiefe Taschen, viele kritische Maße | Messverfahren und Abnahmekriterien |
| Iteration | Häufige Designänderungen, unklare Anforderungen | Prototypenplanung und Versionskontrolle |
Diese Tabelle kann bei der Konstruktionsprüfung herangezogen werden, bevor Zeichnungen oder CAD-Dateien zur Bearbeitung freigegeben werden.
Anwendungen und Einsatzbeispiele für CNC-gefertigte Roboterkomponenten
CNC-gefräste Roboterkomponenten kommen in verschiedenen Robotertypen zum Einsatz, darunter Industrieroboter, kollaborative Roboter, maßgeschneiderte Automatisierungslösungen, Greifersysteme, Prüfsysteme sowie mobile oder landwirtschaftliche Roboter. Das gemeinsame Merkmal ist die mechanische Steuerung: Die Teile müssen unter definierten Bedingungen zusammenpassen, sich bewegen und Vorgänge wiederholen können.
Basierend auf dem IFR World Robotics 2025 Dem Bericht zufolge belief sich die Zahl der weltweit installierten Industrieroboter im Jahr 2024 auf 542.000 Einheiten – mehr als doppelt so viele wie vor einem Jahrzehnt –, wobei die jährlichen Installationen das vierte Jahr in Folge die Marke von 500.000 Einheiten überschritten. Der Einsatz reicht weit über die traditionellen Branchen Automobilbau und Luft- und Raumfahrt hinaus: Lebensmittelverarbeitung, Landwirtschaft und Elektronik gehören zu den wachsenden Anwendungsbereichen, die nun die Nachfrage nach präzisionsgefertigten Roboterkomponenten ankurbeln.
Industrieroboterarme, Gelenke, Getriebe und Gehäuse
In Industrieroboterarmen kommen CNC-gefräste Bauteile zum Einsatz, bei denen Festigkeit, Wiederholgenauigkeit und Passgenauigkeit bei der Montage entscheidend sind. Armglieder, Gelenkgehäuse, Zahnräder, Wellen, Halterungen und Befestigungsplatten können alle CNC-gefräst werden.
Konstruktionsgehäuse schützen Motoren, Getriebe, Lager und Sensoren und dienen gleichzeitig als Befestigungspunkte für diese Bauteile. Da Gehäuse häufig sowohl äußere Befestigungsflächen als auch innere Aufnahmetaschen aufweisen, ist eine sorgfältige Bezugspunktkontrolle erforderlich. Ist das Gehäuse falsch, lassen sich zwar viele andere Teile möglicherweise noch montieren, doch die Verbindung funktioniert dann möglicherweise nicht einwandfrei.
Herausforderungen bei der Fertigung von Komponenten für kollaborative Roboter
Zu den Herausforderungen bei der Fertigung von Komponenten für kollaborative Roboter zählen häufig eine kompakte Bauweise, glatte Außenformen, leichte Konstruktionen und eine hohe Konsistenz bei der Montage. Bei Cobots kann es vorkommen, dass Gelenke, Sensoren und Verkabelung sehr eng beieinander liegen. Dies kann den Zugang für Werkzeuge und die Inspektion erschweren.
Bei Cobots liegt der Schwerpunkt zudem verstärkt auf kontrollierten Bewegungen und zuverlässiger Sensorik. Die Anbringung der Sensoren, die Kabelführung und die Ausrichtung der Gelenke müssen bereits in einer frühen Phase der Konstruktion berücksichtigt werden. Eine kleine Änderung an der Bearbeitung in der Nähe eines Sensors oder eines Gelenks kann sich auf die Kalibrierung oder die Montage auswirken.
CNC-Robotik in der Automobilindustrie, der Luft- und Raumfahrt, der Lebensmittelverarbeitung und der Landwirtschaft
CNC-Robotik kommt in verschiedenen Branchen zum Einsatz. Die Automobil- und Luft- und Raumfahrtindustrie sind traditionelle Anwender von Präzisionsbearbeitung und Automatisierung. In der Lebensmittelverarbeitung kann Robotik zum Schneiden, zur Handhabung oder zum Verpacken eingesetzt werden, wo Hygiene und wiederholbare Bewegungsabläufe eine wichtige Rolle spielen. In der Landwirtschaft können Robotersysteme zum Pflanzen, Ernten, für Handhabungsaufgaben sowie für automatisierte Be- und Entladevorgänge eingesetzt werden.
Für Einkäufer ändert sich an den grundlegenden Machbarkeitsprüfungen nichts. Geometrie, Werkstoff, Toleranz, Oberflächenbeschaffenheit und Prüfung entscheiden nach wie vor darüber, ob ein Bauteil erfolgreich bearbeitet werden kann. Was sich ändert, sind das Betriebsumfeld und der Aufwand für die Validierung.
Anmerkungen zur Fallstudie: Elektrische Greifer, Schwarmrobotik, Roboterfräsen und Roboterarmkomponenten
Mehrere Fallthemen aus der vorgelegten Untersuchung sind für die Entscheidungsfindung hilfreich.
Elektrische Greifer zeigen, wie sich programmierbare Handhabungssysteme hervorragend zur Automatisierung sich wiederholender Aufgaben wie dem Beladen eignen und den Bedarf an maßgeschneiderten Greiferwerkzeugen in CNC-Betrieben mit großer Produktvielfalt reduzieren. Dies ermöglicht schnellere Umrüstzeiten bei variierenden Teilegrößen und macht sie somit ideal für den Einsatz von Robotern in der Maschinenbeschickung.
Die Schwarmrobotik zeigt, wie mehrere Roboter durch koordiniertes Zusammenwirken groß angelegte Montage- oder Logistikaufgaben unterstützen können. Der Vorteil liegt in der Skalierbarkeit und Redundanz, doch die mechanischen Bauteile erfordern nach wie vor standardisierte Schnittstellen und eine zuverlässige Montage.
Das Fräsen mit Robotern zeigt, dass Gelenkarmroboter bei bestimmten Aufgaben mit hohem Durchsatz oder großem Umfang kontinuierliche Fräs- und Prüfvorgänge sowie optimierte Maschinenbeschickungsvorgänge ausführen können. Die Einschränkungen liegen im Vergleich zu herkömmlichen CNC-Maschinen in der Steifigkeit und Präzision.
Die CNC-Bearbeitung von Roboterarmkomponenten ermöglicht eine schnelle Prototypenentwicklung und die Fertigung von Armen, Gelenken, Zahnrädern und Gehäusen aus Materialien wie Stahl, Aluminium und Kunststoffen. Die Entscheidung hängt nach wie vor von der Geometrie, der Belastung, den Toleranzen und der Prüfung ab.
Entscheidungshilfe: So bewerten Sie die CNC-Bearbeitung für die Robotik
Bei der Bewertung der CNC-Bearbeitung für die Robotik sollte man von der Roboterfunktion ausgehen und nicht vom Fertigungsprozess. Das Bauteil sollte unter Berücksichtigung der Bewegungsbelastung, der erforderlichen Toleranzen, der Materialauswahl, der Oberflächengüte, der Lieferantenkapazitäten und des Prüfplans geprüft werden.
Die CNC-Bearbeitung eignet sich am besten, wenn das Bauteil Präzision, Festigkeit, wiederholbare Montage oder schnelle Iterationen ohne spezielle Werkzeuge erfordert. Sie ist möglicherweise weniger geeignet, wenn die Geometrie für Schneidwerkzeuge nicht zugänglich ist, wenn die Toleranzvorgaben unrealistisch sind oder wenn die Konstruktion nicht im Hinblick auf Spannvorrichtungen und Prüfung überprüft wurde.
Wann in Robotersystemen Sonderzahnräder benötigt werden
Wenn in Robotersystemen Sondergetriebe benötigt werden, liegt der Grund dafür in der Regel in der Bauform, der Bewegungssteuerung, der Drehmomentübertragung oder der Integration in eine nicht standardmäßige Welle oder ein nicht standardmäßiges Gehäuse. Standardgetriebe passen möglicherweise nicht in den verfügbaren Bauraum oder in die Befestigungsanordnung.
Sonderzahnräder sollten in folgenden Fällen in Betracht gezogen werden:
- Das Robotergelenk erfordert eine bestimmte Getriebeanordnung
- Das verfügbare Budget ist knapp bemessen
- Die Welle, die Bohrung oder die Nabe entspricht nicht dem Standard.
- Die Ausrichtung der Zahnräder muss mit dem kundenspezifischen Gehäuse übereinstimmen
- Prototypentests erfordern schnelle Konstruktionsänderungen
Überprüfen Sie vor der Freigabe nicht nur das Getriebe, sondern auch die Gegenwelle, die Lager, das Gehäuse und den Prüfplan.
Was sollten Einkäufer prüfen, bevor sie ein CNC-gefrästes Roboterteil freigeben?
Vor der Freigabe sollten Einkäufer sich vergewissern, dass der Lieferant bereits ähnliche Teile hergestellt hat, die kritischen Bezugspunkte und Merkmale mit geeigneten Geräten prüfen kann und in der Lage ist, Zwischenkontrollen mit der Endabnahme zu verknüpfen. Prüfen Sie die Revisionskontrolle, die Rückverfolgbarkeit von Material und Prozess, die Reihenfolge beim Einbau von Einsätzen und bei der Oberflächenbehandlung sowie, ob die Ergebnisse der Erstmusterprüfung dieselbe Bezugspunktstrategie widerspiegeln, die auch bei der Montage verwendet wird. Die Freigabe sollte auf der nachgewiesenen Fähigkeit basieren, die gewählte Geometrie und das Material konsistent zu bearbeiten und zu prüfen, und nicht nur auf einer rein nominellen Angebotsantwort.
Zu den wichtigen Überprüfungen gehören:
- Die wesentlichen Merkmale sind klar gekennzeichnet
- Die Toleranzen werden je nach Funktion zugewiesen
- Das Bezugssystem entspricht der Verwendung in der Baugruppe
- Das Material ist auf die Anforderungen hinsichtlich Belastung, Gewicht und Bearbeitung abgestimmt
- Die Oberflächenbeschaffenheit wird dort definiert, wo sie die Bewegung oder den Sitz beeinflusst
- Die Sensorhalterungen und die Eigenschaften der Gelenke beziehen sich auf dieselben Referenzen.
- Die Prüfmethode ist klar
- Für Prototypen gibt es ein Versionskontrollsystem
Ein Einkäufer sollte außerdem klären, ob es sich bei dem Teil um einen Prototyp, ein Übergangsteil oder ein Serienbauteil handelt. Jede Phase birgt unterschiedliche Risiken.
Wann eignet sich die CNC-Bearbeitung am besten für Prototypen im Bereich Robotik und Kleinserien?
Die CNC-Bearbeitung eignet sich oft gut für Prototypen und Kleinserien, da sich die Geometrie ohne feste Werkzeuge ändern lässt; bei der Serienfertigung sieht die Entscheidung jedoch in der Regel anders aus. Mit steigendem Produktionsvolumen sollten Teams den Zeitpunkt des Design-Freeze überprüfen, die Vorrichtungen neu konzipieren und die CNC-Technologie durch Toleranzoptimierung und wiederholbare Prüfplanung auch für kleinere Hersteller zugänglich machen sowie prüfen, ob für nicht kritische Merkmale ein anderes Verfahren wirtschaftlicher ist. Ein Prototypenteil, das technisch bearbeitbar ist, ist nicht automatisch die richtige Produktionslösung.
Es eignet sich besonders gut für maßgefertigte Arme, Greiferfinger, Sensorhalterungen, Gelenkgehäuse und Zahnräder. Bei Teilen mit sehr hohen Stückzahlen ist es möglicherweise weniger effizient, wenn ein anderes Verfahren die gleichen Toleranz- und Materialanforderungen erfüllen kann, sobald die Konstruktion feststeht.
Vergleichen Sie vor der Freigabe die CNC-Bearbeitung mit alternativen Verfahren. Nutzen Sie den 3D-Druck für schnelle Iterationen oder komplexe Formen mit geringer Belastung, Guss- oder Formverfahren, wenn die Stückzahl den Einsatz von Werkzeugen rechtfertigt, Blechbearbeitung für Schutzvorrichtungen und Abdeckungen sowie Standardkatalogartikel, wenn Lager, Getriebe, Schienen oder Profile die Schnittstellen- und Belastungsanforderungen bereits erfüllen. Entscheiden Sie sich für eine kundenspezifische Bearbeitung, wenn das Bauteil Anforderungen an Ausrichtung, Lagerpassungen, Steifigkeit oder eine Einbauraumgrenze erfüllen muss, die Standardteile nicht erfüllen können.
Bei Prototypen ist es am wichtigsten, Feedback zu sammeln. Wenn eine bearbeitete Verbindung klemmt oder ein Greiffinger verschleißt, sollten bei der nächsten Überarbeitung das CAD-Modell, der Toleranzplan oder die Materialauswahl angepasst werden.
Entscheidungsmatrix: Werkstoff, Toleranz, Bewegungsbelastung, Oberflächengüte, Lieferantenkapazität, Prüfplan
| Entscheidungsbereich | Setzen Sie die CNC-Bearbeitung ein, wenn | Bitte sorgfältig prüfen, wenn |
|---|---|---|
| Material | Stahl, Aluminium oder Kunststoffe sind je nach Last und Bearbeitungsanforderungen geeignet | Gewicht, Verschleiß oder hohe Belastung bringen die Materialgrenzen an ihre Grenzen |
| Toleranz | Kritische Merkmale erfordern eine kontrollierte Passgenauigkeit und Wiederholbarkeit | Für nicht kritische Merkmale gelten enge Toleranzen |
| Bewegungsbelastung | Das Bauteil dient zur Lagerung von Lagern, Zahnrädern, Wellen oder Greifern | Dünne Wände oder Vertiefungen verringern die Steifigkeit |
| Oberflächengüte | Kontakt-, Auflage- oder Drehflächen erfordern eine kontrollierte Oberflächenbearbeitung | Die Oberflächenbehandlung dient lediglich der Optik, verursacht jedoch zusätzliche Kosten |
| Lieferantenkapazität | Der Prozess kann Geometrie, Einrichtung und Prüfung unterstützen | Das Bauteil erfordert zahlreiche Einrichtungsschritte oder weist schwer zu messende Merkmale auf |
| Inspektionsplan | Kritische Maße sind messbar | Versteckte Merkmale oder unklare Bezugspunkte bergen ein Abnahmerisiko |
| Iteration | Es werden Änderungen am Design erwartet | Es gibt häufige Änderungen, doch die Anforderungen sind unklar. |
Kurz gesagt: Die CNC-Bearbeitung für die Robotik ist eine gute Wahl, wenn das Bauteil Bewegung, Passgenauigkeit oder Wiederholgenauigkeit gewährleisten muss. Sie sollte vermieden oder das Bauteil neu konstruiert werden, wenn die Geometrie nicht zugänglich ist, das Bauteil zu flexibel ist, um die Toleranzen einzuhalten, oder die Toleranzvorgaben strenger sind, als es die Funktion erfordert.
FAQs
Welche Teile eines Roboters werden üblicherweise CNC-gefräst?
Die CNC-Bearbeitung für die Robotik dient der Herstellung zentraler Roboterkomponenten wie Arme, Gelenkglieder, Gelenke, Zahnräder, Gehäuse, Greiferfinger und Sensorhalterungen. Diese Schlüsselkomponenten bestimmen die mechanische Passgenauigkeit, Bewegungsstabilität, strukturelle Ausrichtung und Lastübertragung in Roboterbaugruppen. Jede Bewegungs- und Befestigungsschnittstelle ist auf eine präzise Fertigung angewiesen, um eine gleichbleibende Wiederholgenauigkeit und Montagequalität zu gewährleisten. Hochwertig bearbeitete Komponenten verlängern zudem die Lebensdauer und gewährleisten einen zuverlässigen Betrieb in industriellen und kollaborativen Robotersystemen.
Welche Materialien eignen sich am besten für leichte Roboterteile?
Leichte Aluminiumteile sind die erste Wahl für Roboterkonstruktionen, da sie ein geringes Gewicht, hohe Steifigkeit und eine hervorragende Bearbeitbarkeit für bewegliche Komponenten vereinen. Stahl eignet sich für Anwendungen mit hoher Belastung und hohem Verschleiß, während Spezialkunststoffe gut für nichttragende Roboterabdeckungen und Halterungen mit geringer Belastung geeignet sind. Die Materialauswahl richtet sich nach den Anforderungen an die Nutzlast, die Bewegungsgeschwindigkeit und die Umgebungsbedingungen, um die Gesamtleistung des Roboters zu optimieren. Die richtige Wahl der Legierung verhindert Verformungen, Ermüdung und unnötiges Gewicht, die die Bewegungseffizienz des Roboters beeinträchtigen könnten.
Welche Toleranz ist bei Robotergelenken erforderlich?
Die Toleranzanforderungen variieren je nach Gelenkfunktion, Passung der Lager, Ausrichtung der Zahnräder und der Toleranzsumme bei der Montage in Roboterkonstruktionen. Präzisionsgefertigte, CNC-bearbeitete Robotergelenke unterliegen einer strengen Maßkontrolle, um die Positioniergenauigkeit und eine gleichmäßige Drehbewegung zu gewährleisten. Für moderne Robotik wird ein Präzisionsmaßstab von ±0,015 mm angegeben, der jedoch anhand des Materials, der Geometrie und der Leistungsfähigkeit des Lieferanten validiert werden muss. Gut geplante Toleranzen verhindern Fehlausrichtungen, Verschleiß und Kalibrierungsabweichungen in Gelenkroboterkonstruktionen.
Inwiefern unterstützt die CNC-Bearbeitung kollaborative Roboter?
Durch CNC-Bearbeitung entstehen kompakte Gehäuse, Sensorhalterungen, Greiferteile und Verbindungselemente, die speziell für kollaborative Roboterkonfigurationen entwickelt wurden. Präzise Maßhaltigkeit und hohe Wiederholgenauigkeit ermöglichen sichere, reibungslose Bewegungen für die Mensch-Roboter-Interaktion am Arbeitsplatz. Das Verfahren unterstützt zudem das schnelle Prototyping und die Anpassung kleiner Losgrößen, um die Iteration beim Cobot-Design und die strukturelle Optimierung zu beschleunigen. Die zuverlässige Bauteilegenauigkeit gewährleistet langfristige Stabilität und eine breite industrielle Akzeptanz moderner kollaborativer Roboter.
Maßgefertigte oder serienmäßige Robotik-Bauteile?
Maßgefertigte Zahnräder für Roboter sind erforderlich, wenn Standardteile nicht in kompakte Einbauräume, für spezielle Wellengrößen oder für besondere Anforderungen an die Drehmomentübertragung geeignet sind. Serienkomponenten eignen sich für allgemeine Roboterstrukturen, senken die Herstellungskosten und verkürzen die Projektdurchlaufzeiten erheblich. Ingenieure bewerten Platzbeschränkungen, Belastungsanforderungen und Ausrichtungsgenauigkeit, um zwischen maßgefertigten und vorgefertigten Teilen zu entscheiden. Die richtige Auswahl sorgt für ein ausgewogenes Verhältnis zwischen Leistung, Budget, Durchlaufzeit und zukünftiger Wartung für vollständige Roboterautomatisierungssysteme.
Referenzen
https://www.asminternational.org