El mecanizado CNC para robótica se utiliza cuando una pieza de un robot requiere una geometría controlada, un ajuste repetible y una resistencia del material que pueden resultar difíciles de conseguir con métodos de fabricación de menor precisión.
Es habitual que las piezas clave de la máquina —como brazos, articulaciones, engranajes, carcasas, pinzas, accesorios y soportes para sensores— sean objeto de atención, ya que estas piezas influyen en el movimiento, la rigidez, la alineación y el rendimiento del montaje.
Para los equipos de ingeniería, la cuestión principal no es si el mecanizado CNC permite fabricar una pieza. La pregunta más pertinente es si el diseño es adecuado para el mecanizado con la tolerancia, el material, el coste y el plazo de entrega requeridos. Una articulación robótica con asientos de rodamientos, interfaces de engranajes, soportes de motor y ubicaciones de sensores puede ser técnicamente mecanizable, pero es posible que el diseño aún requiera modificaciones para facilitar el acceso de las herramientas, el control de la configuración, la inspección o el ajuste durante el montaje.
Esta guía se centra en aspectos prácticos para la toma de decisiones: cuándo es necesario el mecanizado CNC, en qué casos puede suponer un riesgo, qué materiales se suelen tener en cuenta y qué deben comprobar los compradores antes de aprobar un componente de robot mecanizado mediante CNC.
¿Qué es el mecanizado CNC para la robótica y por qué es importante?
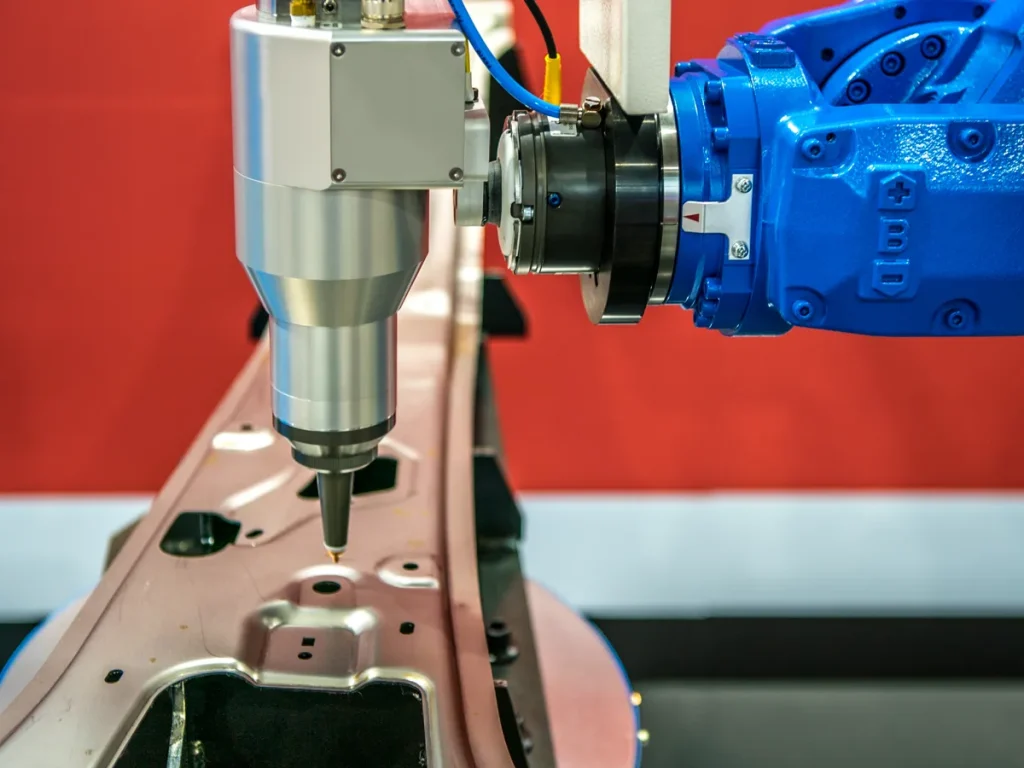
La integración del CNC en la producción se basa en el mecanizado CNC como proceso de fabricación sustractiva, en el que una herramienta de corte retira material de una pieza de trabajo siguiendo trayectorias programadas. En robótica, el mecanizado CNC se utiliza para fabricar piezas mecánicas que deben mantener su forma bajo movimiento, carga y montajes repetidos.
El principal valor del mecanizado CNC para la robótica es el control. Las piezas de los robots suelen necesitar orificios, agujeros, cavidades, ranuras, superficies de montaje e interfaces giratorias para alinearse entre sí. Si estas características se desplazan, el robot puede perder repetibilidad, generar un exceso de fricción o transmitir la carga en la dirección incorrecta.
El mecanizado CNC resulta especialmente útil para prototipos y series pequeñas, ya que los cambios de diseño suelen poder realizarse mediante actualizaciones CAD/CAM, en lugar de recurrir a utillaje específico. Esto facilita el desarrollo de robots a medida, en los que la longitud del brazo, la disposición de las articulaciones, el diseño de la pinza o la posición de los sensores pueden variar durante las pruebas.
Cuándo es necesario el mecanizado CNC para las articulaciones robóticas
El mecanizado CNC suele ser necesario en las articulaciones robóticas cuando la pieza controla la rotación, la posición de los cojinetes, la alineación del motor, el engranaje o la transferencia de carga. Estas características son delicadas, ya que los pequeños errores pueden acumularse a lo largo del brazo robótico.
Un componente de unión puede requerir mecanizado CNC cuando presenta las siguientes características:
- Asientos de rodamientos o orificios de eje
- Superficies de montaje del motor y la caja de cambios
- Características de la alineación de engranajes
- Orificios para pasadores de centrado o elementos de posicionamiento de precisión
- Superficies de montaje del sensor
- Compartimentos estructurales que reducen el peso pero deben mantener la rigidez
- Superficies de acoplamiento que controlan la perpendicularidad o el paralelismo
La decisión clave es si el elemento de unión afecta a la precisión del movimiento o si solo aporta una estructura general. Una cubierta no crítica puede permitir un control menos estricto. El agujero de un rodamiento o la interfaz de un engranaje suelen requerir un control más estricto, ya que afectan directamente al movimiento.
Por qué es importante la repetibilidad en el mecanizado CNC para la robótica
La repetibilidad es la capacidad de un robot para volver a la misma posición al recibir el mismo comando. Las piezas mecanizadas con CNC favorecen la repetibilidad al mantener la coherencia de las interfaces mecánicas entre una pieza y otra.
La importancia de la repetibilidad en el mecanizado CNC para la robótica se reduce a la acumulación de tolerancias. Un brazo robótico puede incluir varios eslabones, articulaciones, ejes, engranajes y carcasas. Cada pieza puede ser aceptable por sí sola, pero las pequeñas variaciones pueden sumarse a lo largo del conjunto. Si no se controla la acumulación de tolerancias, el punto central de la herramienta, la posición de la pinza o el campo de visión del sensor pueden desplazarse.
La repetibilidad también influye en el mantenimiento y la sustitución. Si más adelante hay que sustituir una carcasa de unión mecanizada, la nueva pieza debe encajar con los mismos cojinetes, motores y elementos de fijación sin que el conjunto quede desalineado. Por eso, la planificación de la inspección es tan importante como el mecanizado.
Cómo afectan las tolerancias estrictas al rendimiento del montaje robotizado
Las tolerancias estrictas deben asignarse en función de la función y del tipo de control, y no aplicarse de manera uniforme. Los límites dimensionales por sí solos no controlan las relaciones entre los elementos, por lo que los elementos giratorios y de posicionamiento pueden requerir controles de posición, excentricidad, perpendicularidad o planitud, en lugar de limitarse únicamente a las dimensiones ±. Por ejemplo, los elementos de cojinetes y ejes dependen de la coaxialidad y la excentricidad, mientras que las superficies de montaje del motor y la caja de cambios dependen de la planitud y la perpendicularidad para mantener la alineación bajo la precarga del montaje.
Una de las fuentes citadas afirma que mecanizado de precisión CNC puede mantener tolerancias de aproximadamente ±0,015 mm para aplicaciones robóticas. Este valor debe considerarse un objetivo específico del proyecto, no una regla universal. Debe verificarse en función del material, la geometría, la configuración de la máquina, el método de inspección y la capacidad del proveedor.
Las tolerancias más ajustadas suelen aumentar el coste y el plazo de entrega, ya que pueden requerir una configuración más minuciosa, un mecanizado más lento, inspecciones adicionales o un acabado extra. La decisión debe basarse en la función. Merece la pena reducir una tolerancia cuando ello garantiza la precisión del movimiento, la vida útil de los rodamientos, el contacto entre engranajes o la alineación del conjunto. En cambio, puede que no merezca la pena reducirla en cubiertas estéticas, cavidades de holgura o superficies no de posicionamiento.
Imagen: Mapa de componentes de un robot con anotaciones: brazos, articulaciones, engranajes, carcasas y pinzas
Un mapa útil de los componentes de un robot debería clasificar las piezas por función, y no solo por forma:
| Área de robótica | Características típicas del mecanizado CNC | Por qué son importantes |
|---|---|---|
| Brazos y eslabones | Huecos, caras frontales, orificios para fijaciones, conductos para cables | Controlar el peso, la rigidez y el ajuste durante el montaje |
| Articulaciones | Orificios para rodamientos, soportes del motor, interfaces de la caja de cambios | Control de la rotación, la alineación y la repetibilidad |
| Engranajes | Dientes, cubos, orificios, ranuras de chaveta o elementos de posicionamiento | Control de la transmisión del par y de la suavidad del movimiento |
| Carcasas | Superficies de montaje, tapas, bolsillos internos | Proteger los componentes y ubicar los conjuntos |
| Pinzas | Puntas, mordazas, adaptadores, placas de montaje | Control del contacto de las piezas y flexibilidad en la conmutación |
| Soportes para sensores | Agujeros pequeños, caras de referencia, soportes | Campo de visión del sensor de control y posición de medición |
Este tipo de mapa anotado ayuda a los compradores a decidir qué elementos deben someterse a inspección y cuáles pueden ajustarse a las tolerancias de mecanizado estándar.

Viabilidad: ¿Se puede mecanizar mediante CNC un componente robótico?
La mayoría de los componentes robóticos pueden mecanizarse mediante CNC siempre que la geometría permita el acceso de la herramienta y el material pueda cortarse de forma estable. Los problemas de viabilidad suelen deberse a paredes delgadas, cavidades profundas, elementos internos, esquinas interiores agudas, secciones largas sin apoyo o requisitos de tolerancia que no se ajustan al diseño de la pieza.
Una pieza viable no es solo aquella que se puede cortar. También debe sujetarse de forma segura durante el mecanizado, inspeccionarse tras el mecanizado y montarse sin tener que forzar la colocación de las piezas de acoplamiento.
Consideraciones de diseño para componentes robóticos mecanizados con CNC
Las consideraciones de diseño para el mecanizado robótico y los componentes robóticos mecanizados por CNC deben partir de la función. Identifica las superficies que controlan el movimiento, la carga, el sellado, la fijación o la detección. Estas deben convertirse en los puntos de referencia y de inspección principales.
Entre las comprobaciones importantes del diseño se incluyen:
- Si las herramientas de corte pueden llegar a todas las características
- Si las esquinas internas permiten un radio de herramienta realista
- Si las paredes delgadas pueden deformarse durante el mecanizado
- Ya sea que los bolsillos profundos provoquen vibraciones o una mala evacuación de virutas
- Si es posible taladrar agujeros desde puntos de acceso
- Si las indicaciones de tolerancia están vinculadas a los puntos de referencia funcionales
- Si la pieza se puede sujetar sin dañar las superficies críticas
Los diseñadores deben evitar asignar tolerancias muy ajustadas a todas las características. Las tolerancias muy ajustadas deben reservarse para las interfaces que afectan al movimiento, la alineación o el montaje. De este modo, la pieza resulta más fácil de fabricar y de inspeccionar.
Cómo influyen las características de montaje de los sensores en el mecanizado de piezas con robots
Los soportes para sensores pueden complicar el mecanizado, ya que suelen combinar orificios pequeños, superficies de gran precisión y un acceso limitado. Las cámaras, los codificadores, los sensores de proximidad y los sensores de fuerza pueden requerir una posición controlada con respecto a la articulación, la pinza o el efector final.
La forma en que las características de montaje de los sensores afectan al mecanizado de piezas robóticas depende de su ubicación y tolerancia. Un soporte de sensor en una cara abierta puede resultar sencillo. Un hueco para el sensor en el interior de la carcasa de una articulación puede requerir herramientas más largas, múltiples configuraciones o un acceso especial para la inspección.
El principal riesgo es la falta de coincidencia de referencias. Si el soporte del sensor se mecaniza con una configuración determinada, pero el orificio de unión se mecaniza con otra, la posición relativa puede variar, a menos que el plan de configuración controle ambos elementos. En el caso de los robots controlados por sensores, esto puede provocar problemas de calibración, incluso si cada elemento cumple por separado su propia tolerancia dimensional.
Retos del mecanizado de componentes ligeros de articulaciones robóticas
Los eslabones robóticos ligeros reducen la masa en movimiento, pero pueden resultar difíciles de mecanizar. Las dificultades que plantea el mecanizado de los componentes de los eslabones robóticos ligeros suelen deberse a las paredes delgadas, las grandes luces y las cavidades para la reducción de peso.
Las secciones delgadas pueden vibrar durante el corte. Los tramos largos pueden resultar difíciles de sujetar sin que se deformen. Las cavidades de gran tamaño pueden reducir la rigidez, por lo que la pieza puede moverse durante el mecanizado o posteriormente bajo carga. Estos problemas pueden afectar a la planitud, la posición de los orificios y la alineación de las superficies de acoplamiento.
Un enfoque práctico del diseño consiste en eliminar peso únicamente en aquellas zonas en las que ello no debilite las vías de carga críticas. Los diseñadores también deben valorar si la pieza puede mecanizarse siguiendo una secuencia estable. Si la geometría final resulta demasiado flexible antes de que se hayan completado todas las características críticas, el control de las tolerancias se complica, lo que limita la capacidad de las máquinas para funcionar de forma continua.
Lista de comprobación: Análisis de viabilidad CNC en cuanto a geometría, acceso, material y ajuste de montaje
| Área de revisión | Qué comprobar | Riesgo de decisión |
|---|---|---|
| Geometría | Paredes delgadas, huecos profundos, esquinas interiores afiladas, elementos ocultos | Problemas de acceso a la herramienta o de desviación |
| Portapiezas | Superficies de sujeción planas, pieza estable, secuencia de preparación | Desplazamiento o deformación de una pieza |
| Material | Mecanizabilidad, requisitos de resistencia, peso objetivo | Acabado superficial deficiente o masa excesiva |
| Tolerancia | Puntos de referencia funcionales, ajustes de rodamientos, alineación de engranajes, posición de los sensores | Desalineación o elevada carga de inspección |
| Ajuste de montaje | Superficies de acoplamiento, elementos de fijación, espigas, conductos para cables | Reelaboración durante el montaje |
| Inspección | Acceso para la medición; dimensiones críticas definidas | Características críticas no verificadas |
| Iteración | Cambios previstos en el diseño tras las pruebas | Mayor coste si el diseño no es modular |
Esta lista de comprobación debe completarse antes de elaborar el presupuesto o dar el visto bueno a la producción, especialmente en el caso de las uniones, los brazos y los alojamientos de precisión.
Cómo funciona el mecanizado CNC para piezas de robots
El mecanizado CNC de piezas para robots comienza con la geometría generada por CAD. El software CAM convierte el diseño en trayectorias de herramienta. Estas trayectorias se transforman en instrucciones para la máquina, lo que suele denominarse «código G». A continuación, la máquina corta la pieza y, tras ello, se lleva a cabo una inspección para comprobar si la pieza cumple con las dimensiones requeridas.
En el ámbito de la robótica, el proceso debe incluir información sobre el montaje. Si una articulación se atasca, un engranaje tiene un contacto deficiente o un sensor necesita un ajuste de calibración, esa información debe vincularse al modelo CAD y al plan de tolerancias.
Comparación entre el torneado y el fresado CNC para piezas de robots
Una comparación de Torneado CNC Y el fresado de piezas para robots comienza por la forma de la pieza. El torneado se utiliza para piezas que giran alrededor de un eje durante el mecanizado. El fresado se utiliza para piezas prismáticas, en forma de placa, con cavidades o con múltiples caras.
| Proceso | Piezas habituales de los robots | Mejor ajuste | Límites principales |
|---|---|---|---|
| Torneado CNC | Ejes, casquillos, espaciadores, cubos redondos | Elementos redondos o axisimétricos | Menos adecuado para bolsillos externos complejos |
| Fresado CNC | Enlaces, carcasas, dedos de sujeción, soportes, placas de unión | Superficies planas, cavidades, ranuras, patrones de orificios | El acceso a las herramientas y el número de configuraciones pueden limitar la geometría |
| Torneado y fresado combinados | Bujes de engranajes, ejes de unión con chavetas o orificios | Piezas con elementos tanto redondos como fresados | Es necesario planificar mejor los puntos de referencia y las inspecciones |
La clase de máquina debe basarse en el conjunto de características, no solo en el nombre de la pieza. Las piezas prismáticas sencillas pueden adaptarse al mecanizado de 3 ejes; el mecanizado indexado de 4 ejes puede reducir la necesidad de volver a sujetar la pieza en el caso de características en múltiples caras, y el mecanizado de 5 ejes suele estar justificado cuando las caras compuestas, los orificios en ángulo o las características de difícil acceso deben permanecer vinculadas a la misma estructura de referencia. Cada configuración adicional aumenta el riesgo de desplazamiento posicional, por lo que los compradores deben preguntar si las características críticas pueden completarse e inspeccionarse a partir de una sola sujeción o mediante transferencias controladas de puntos de referencia.
A menudo, la elección no se reduce a un proceso u otro. Muchas piezas de robots requieren tanto operaciones de torneado como de fresado. Lo importante es definir qué características controlan la alineación y mantenerlas vinculadas a un plano de referencia claro.
Cómo mejoran los engranajes a medida el control del movimiento robótico
Los engranajes a medida se utilizan cuando los engranajes estándar no se adaptan a las necesidades del robot en cuanto a espacio, movimiento, carga o integración. La forma en que los engranajes a medida mejoran el control del movimiento robótico depende de la función que desempeñan en la transmisión del par y la respuesta posicional.
Puede ser necesario un engranaje a medida cuando la articulación de un robot tiene un espacio de movimiento reducido, un tamaño de eje no estándar, un patrón de montaje especial o una relación de transmisión requerida que no se ajusta a las piezas disponibles en el mercado. El mecanizado CNC permite el desarrollo de engranajes a medida, especialmente para prototipos y series pequeñas en las que el uso de utillaje específico puede no resultar práctico.
El principal riesgo de diseño no es solo la geometría de los dientes. La alineación del orificio del engranaje, la geometría del cubo, las superficies de montaje y las piezas de acoplamiento también influyen en el movimiento. Un engranaje bien mecanizado puede seguir funcionando mal si la disposición de la carcasa, el eje o los rodamientos provoca una desalineación.
Cómo las pinzas eléctricas facilitan la configuración flexible de robots CNC
Las pinzas eléctricas permiten configuraciones flexibles de robots CNC, ya que pueden programarse para piezas de distintos tamaños y automatizar por completo los flujos de trabajo rutinarios de la máquina, además de realizar tareas de carga y descarga. Esto resulta útil cuando una célula de mecanizado procesa piezas variadas en lugar de un único producto fijo.
En las operaciones de mecanizado estándar y en las operaciones con CNC, las pinzas eléctricas suelen compararse con las neumáticas, ya que su programabilidad puede reducir la necesidad de utilizar utillaje a medida. Esto es importante en el mecanizado de gran variedad de piezas, donde los cambios frecuentes de piezas pueden alargar el tiempo de preparación.
Desde el punto de vista del diseño de piezas, las pinzas plantean sus propias necesidades de mecanizado. Los dedos de las pinzas, las placas adaptadoras y los bloques de montaje pueden requerir un mecanizado CNC para adaptarse a la forma de la pieza de trabajo y a la interfaz del robot. Es necesario comprobar el acabado de las superficies de contacto, el acceso a los elementos de fijación y la repetibilidad de la ubicación de estas piezas.
Diagrama del proceso: CAD/CAM, código G, mecanizado, inspección, retroalimentación del montaje
Un diagrama de proceso práctico para piezas de robots debería incluir cinco etapas interrelacionadas:
- Revisión del modelo CAD y de su funcionamiento. Se identifican las interfaces críticas, entre las que se incluyen juntas, cojinetes, engranajes, sensores y superficies de montaje.
- Programación CAM y generación de código G. Las trayectorias de herramienta se crean en función del material, la geometría, la configuración y el acabado superficial requerido.
- Control del mecanizado y la configuración: la pieza se corta mientras se controlan la sujeción de la pieza, el acceso de la herramienta y la secuencia de operaciones.
- Inspección: Las dimensiones críticas se miden comparándolas con el plano o la definición basada en el modelo.
- Comentarios sobre el montaje: los resultados relativos al ajuste, el movimiento y la alineación se revisan antes de la siguiente fase de diseño o de la siguiente tanda de producción.
Este bucle es importante porque las piezas robóticas suelen cambiar tras las pruebas de movimiento.
Materiales para brazos robóticos, eslabones, articulaciones y carcasas
La elección del material influye en el peso, la rigidez, el comportamiento durante el mecanizado, el acabado superficial y el coste. El estudio presentado señala que el acero, el aluminio y los plásticos son los materiales más habituales para las piezas de robots mecanizadas con CNC. Cada grupo de materiales se adapta a diferentes necesidades mecánicas.
El aluminio suele ser la opción preferida para estructuras ligeras. El acero puede utilizarse cuando se requiere una mayor resistencia a la carga o al desgaste. Los plásticos pueden emplearse para cubiertas, piezas sometidas a cargas reducidas, elementos aislantes o componentes en los que el peso es un factor determinante, dependiendo del entorno mecánico.
Los mejores materiales para los eslabones de un brazo robótico ligero
Los mejores materiales para los eslabones de los brazos robóticos ligeros suelen elegirse buscando un equilibrio entre masa, rigidez, resistencia y facilidad de mecanizado. El aluminio es una opción habitual para los eslabones de los brazos, ya que permite reducir el peso y, al mismo tiempo, facilita el mecanizado CNC de cavidades, superficies de montaje y patrones de orificios.
Los plásticos también pueden considerarse para componentes sometidos a cargas reducidas o no estructurales en los que el peso es un factor crítico. Su uso debe validarse en función de los requisitos de carga, calor, desgaste y fijación. El acero resulta menos adecuado para los eslabones ligeros cuando la masa en movimiento es la principal limitación, aunque puede seguir siendo necesario en zonas compactas sometidas a cargas elevadas.
La decisión debe basarse en cómo se mueve la articulación. Una articulación de brazo largo que se mueva rápidamente puede beneficiarse de un peso menor. Un componente de articulación corto que soporte una fuerza elevada puede necesitar un material más resistente o rígido, aunque ello suponga un aumento de la masa.
Elegir entre el aluminio 6061 y el 7075 para las piezas de los robots
La elección del material depende de la trayectoria de la carga, el entorno, el método de fijación, los puntos de desgaste y el plan de acabado. En el caso de las piezas de aluminio, hay que tener en cuenta la exposición a la corrosión, la sensibilidad a la fatiga, la durabilidad de la rosca, si los orificios roscados necesitan insertos, el contacto galvánico con los elementos de fijación de acero y si el anodizado u otros acabados podrían afectar a las características críticas para el ajuste. Si la pieza está sometida a cargas de sujeción repetidas, contacto deslizante o una elevada tensión de apoyo local, hay que comprobar que la aleación y el acabado seleccionados sean adecuados para ese uso antes de su comercialización.
Según el ASM Internacional, la elección no debe basarse únicamente en el nombre de la aleación. Los compradores deben comprobar lo siguiente:
- Resistencia y rigidez necesarias
- Carga prevista y ciclo de movimiento
- Estabilidad en el mecanizado de secciones delgadas
- Requisitos de acabado superficial
- Estrategia de fijación e inserción
- Requisitos de inspección para características críticas
- Repercusiones en la disponibilidad y los plazos de entrega
Lo fundamental es que la elección de la aleación debe favorecer tanto el mecanizado como el rendimiento del robot.
Ventajas del aluminio 7075 para los componentes de los brazos robóticos: qué hay que comprobar
Los componentes de los eslabones, fabricados en aluminio 7075 ligero, ofrecen ventajas clave para los componentes de los brazos robóticos que se utilizan en aplicaciones estructurales en las que el peso es un factor determinante. El objetivo del diseño es que el brazo sea ligero, al tiempo que se mantiene la resistencia suficiente para el movimiento y la carga.
Antes de seleccionarlo, los equipos deben comprobar si esa ventaja se aplica realmente a la pieza en cuestión. Un material más resistente no soluciona una geometría deficiente, unas trayectorias de carga débiles ni unas paredes delgadas sin refuerzo. Además, puede afectar a la estrategia de mecanizado, el acabado, la inspección y el abastecimiento.
La validación debe incluir una revisión de la carga, una revisión del montaje y una prueba del prototipo cuando el componente afecte a la seguridad, la precisión de movimiento o la vida útil. Esto es especialmente importante en el caso de los eslabones del brazo, las placas de articulación y las estructuras de las pinzas.
Limitaciones del aluminio para componentes de robots sometidos a cargas elevadas
El aluminio tiene sus limitaciones en los componentes de robots sometidos a cargas elevadas. Puede que no sea la mejor opción cuando la pieza soporta una carga concentrada, golpes repetidos, una tensión elevada en los rodamientos o desgaste en las superficies de contacto.
Las limitaciones del aluminio para los componentes de robots sometidos a cargas elevadas suelen aparecer en las interfaces: asientos de rodamientos, soportes de ejes, fijaciones de engranajes, orificios roscados y puntos de contacto de las pinzas. Es posible que el diseño requiera inserciones, superficies de apoyo de rodamientos más amplias, una geometría diferente o un material distinto.
Si la pieza es crítica en cuanto a la carga, la selección del material debe evaluarse teniendo en cuenta el conjunto completo. Una sola pieza de aluminio puede cumplir con las especificaciones de su propio plano, pero el robot podría fallar si el conjunto de articulaciones no es lo suficientemente rígido.

Ventajas y limitaciones del mecanizado CNC para la robótica
En la industria manufacturera moderna, el mecanizado CNC ofrece a los ingenieros un gran control sobre la geometría, las características de la superficie y la elección del material. Resulta útil para piezas a medida, prototipos y componentes de producción en los que el ajuste y la repetibilidad son fundamentales.
Las limitaciones también son importantes. El mecanizado CNC elimina material, por lo que la geometría de la pieza debe permitir el acceso de la herramienta. Puede resultar costoso cuando las piezas requieren numerosas configuraciones, tolerancias estrictas en muchas superficies, inspecciones complejas o materiales difíciles de mecanizar. Además, no elimina la necesidad de un diseño mecánico sólido.
Mecanizado CNC frente al fresado con robot: precisión, rigidez, flexibilidad y compensaciones en cuanto a costes
El fresado robotizado puede ofrecer flexibilidad para trabajos de gran envergadura o menos exigentes, lo que permite a los operarios controlar las máquinas-herramienta sin intervención manual para la producción de piezas complejas. Estas características dependen de la rigidez, la estabilidad térmica y el control predecible de las herramientas, aspectos que las máquinas CNC especializadas suelen ofrecer de forma más fiable. La elección del proceso debe basarse en la categoría de características críticas, y no en una suposición general sobre la automatización.
El estudio mencionado señala una importante incertidumbre: los robots aún no alcanzan el nivel de rigidez y precisión a nivel de micras de las máquinas CNC, pero pueden ofrecer un coste asequible, adaptabilidad y una buena relación calidad-precio para la creación de prototipos o para tareas menos exigentes en cuanto a rigidez. Esto significa que el fresado con robots debe evaluarse en función de la tarea concreta, y no considerarse un sustituto directo.
| Factor | Mecanizado CNC | Fresado robotizado |
|---|---|---|
| Necesidad de precisión | Se adapta mejor a las funciones que requieren un alto nivel de control | Más adecuado para tareas menos rígidas o para trabajos más amplios y flexibles |
| Rigidez | Estructura de la máquina más resistente | Menor rigidez en muchas configuraciones |
| Flexibilidad | Eficaz gracias a la programación y a los dispositivos de sujeción | Gran alcance y flexibilidad de recorrido |
| Comportamiento de los costes | La complejidad de la configuración y el mecanizado influyen en el coste | Puede reducir los costes en algunas tareas flexibles o de gran envergadura |
| Mejor uso | Juntas, engranajes, carcasas, interfaces de precisión | Tareas a gran escala de fresado, recorte e inspección |
En el caso de los componentes robóticos que controlan la alineación de los rodamientos o el engranaje, el mecanizado CNC tradicional suele ser el punto de partida más seguro.
Robots CNC reprogramables y modulares para series cortas y piezas a medida
Los robots CNC reprogramables y modulares destacan en la automatización del manejo de máquinas CNC y resultan útiles cuando la gama de productos cambia con frecuencia. El estudio que se adjunta relaciona estos sistemas con una reducción del tiempo de inactividad, una menor necesidad de utillaje a medida y una solución a la escasez de mano de obra cualificada.
En la fabricación de componentes robóticos, esto cobra mayor importancia en la creación de prototipos y en las series cortas. Es posible que un taller tenga que mecanizar varias versiones de un dedo de pinza, una placa de unión o una carcasa mientras el diseño del robot sigue cambiando. Los sistemas reprogramables permiten este tipo de iteraciones.
No obstante, el comprador debe comprobar si la configuración del proveedor permite respetar las tolerancias requeridas. La flexibilidad es útil, pero no sustituye al diseño de los dispositivos de sujeción, a la planificación de las inspecciones ni al control de materiales.
Inteligencia artificial, aprendizaje automático y programación CNC basada en la nube en la fabricación robotizada
La inteligencia artificial y el aprendizaje automático se están aplicando a la robótica CNC para facilitar la toma de decisiones en tiempo real, el mantenimiento predictivo, la optimización de procesos y una programación más sencilla. La programación CNC basada en la nube permite el acceso remoto, la colaboración, la seguridad de los datos y el análisis de las tendencias de rendimiento en todas las instalaciones.
Para un comprador, el valor práctico no reside en la marca del software. El valor radica en si la programación, los datos de inspección y la retroalimentación del proceso reducen los errores y mejoran la repetibilidad. Por ejemplo, los datos de tendencias pueden ayudar a identificar el desgaste de las herramientas, la deriva de la máquina o los cambios en el proceso antes de que afecten a un lote de piezas fabricadas por el robot.
Estas herramientas deben considerarse un apoyo al proceso. No eliminan la necesidad de contar con planos claros, puntos de referencia controlados y criterios de inspección bien definidos.
Se busca información: Informes del sector sobre las tendencias en automatización robótica CNC
La robótica CNC está transformando los flujos de trabajo de la fabricación, y varias de las tendencias que se atribuyen a este campo requieren pruebas más sólidas a nivel sectorial antes de que puedan utilizarse para la planificación de inversiones. Las investigaciones presentadas apuntan a un crecimiento en los ámbitos de la inteligencia artificial, la programación en la nube, las pinzas eléctricas, la robótica de enjambre y las aplicaciones más allá de los sectores de la automoción y la industria aeroespacial. Sin embargo, en algunas áreas faltan tasas de adopción cuantificadas o parámetros de referencia de rendimiento.
Esto es importante a la hora de tomar decisiones. Un equipo de diseño puede utilizar estas tendencias para orientar la planificación futura, pero debe evitar dar por sentado que todos los proveedores o instalaciones cuentan con la misma capacidad de automatización. Antes de optar por un método de automatización, es necesario confirmar el proceso real, el método de inspección y el historial de tolerancias de piezas similares.
Fallos habituales, riesgos y problemas de calidad
Las piezas de los robots suelen fallar en las interfaces, no en el centro de geometrías sencillas. Los orificios, las superficies de montaje, los elementos de engranajes, los soportes de sensores, los elementos de fijación y las transiciones de paredes delgadas merecen una atención especial.
Entre los riesgos más comunes se encuentran la desalineación, un acabado superficial deficiente, la deformación de las piezas, la acumulación de tolerancias y el desgaste en las superficies de contacto. Muchos de estos riesgos pueden reducirse vinculando la intención de diseño con la fabricación y la inspección.
¿Qué provoca la desalineación en los componentes de las articulaciones de los brazos robóticos?
Las causas de la desalineación en los componentes de las articulaciones de los brazos robóticos suelen ser una combinación de factores relacionados con el diseño, el mecanizado y el montaje. Es posible que un orificio esté ligeramente descentrado. Quizás una superficie de montaje no sea lo suficientemente plana. Puede que una caja de cambios o un rodamiento se hayan colocado a la fuerza mediante elementos de fijación. Los pequeños errores pueden acumularse a lo largo de toda la articulación.
Entre las causas más comunes se encuentran:
- Características de referencia que no coinciden con la función de ensamblaje
- Varias configuraciones sin un control suficiente de la ubicación
- Orificios para rodamientos y soportes de motor mecanizados a partir de diferentes referencias
- Secciones delgadas que se desplazan durante el mecanizado
- Orificios de fijación utilizados como elementos de posicionamiento sin el control adecuado
- Características del engranaje o del eje que no están alineadas con el eje de la junta
La desalineación puede manifestarse en forma de atascos, calentamiento, ruido, falta de repetibilidad o desgaste irregular de los engranajes.
Puntos habituales de fallo en las piezas de los brazos robóticos de precisión
Entre los puntos más propensos a fallos en las piezas de los brazos robóticos de precisión se encuentran las interfaces de las articulaciones, las zonas de fijación, los asientos de los rodamientos, los soportes de los engranajes, los dedos de la pinza y los soportes de los sensores. Estas zonas están sometidas a cargas, movimientos, tensiones de montaje o sensibilidad a la calibración.
Los fallos pueden ser mecánicos o funcionales. Es posible que una pieza no se agriete, pero aun así falle al permitir un movimiento excesivo, perder la alineación o provocar que el robot no alcance la posición correcta. Por este motivo, la inspección debe centrarse en los aspectos que afectan al movimiento y al montaje, y no solo en los defectos visibles.
Riesgos derivados de un acabado superficial deficiente en las piezas de las articulaciones robóticas
El acabado superficial debe ajustarse a la función de la interfaz. Los asientos de los cojinetes y los planos de fijación requieren un comportamiento de asentamiento estable; los elementos deslizantes necesitan un acabado adecuado para la fricción y el desgaste; las superficies de sellado deben garantizar un contacto uniforme; las zonas de contacto de las pinzas pueden requerir una textura controlada que permita un agarre sin dañar la pieza; y los planos de montaje de los sensores deben evitar ondulaciones que alteren la alineación o la medición. Por lo tanto, el acabado superficial es un requisito para el rendimiento del conjunto, no solo una cuestión estética.
Un acabado deficiente en el asiento de un rodamiento, en una parte del eje o en una superficie de acoplamiento puede alterar la distribución de la carga. También puede hacer que el montaje resulte demasiado apretado o demasiado holgado, incluso cuando las dimensiones parezcan correctas. Por lo tanto, los requisitos de acabado superficial deben establecerse en función de la finalidad y indicarse formalmente en los planos y las especificaciones. Basándose en ISO 1302, los requisitos relativos a la textura de la superficie se transmiten mediante símbolos gráficos estandarizados e indicaciones textuales en la documentación técnica del producto; sin ello, es posible que la intención del acabado no se interprete de forma coherente entre los equipos de diseño y mecanizado, o entre un comprador y un proveedor.
Factores que influyen en la tolerancia de las piezas de robots mecanizadas con CNC
Entre los factores que influyen en la tolerancia de las piezas de robots mecanizadas con CNC se encuentran la geometría, el material, el acceso de la herramienta, el número de configuraciones, la sujeción de la pieza, el desgaste de la herramienta, los efectos térmicos y el método de inspección. Las paredes delgadas y los huecos profundos son más difíciles de sujetar que los bloques compactos. Las configuraciones múltiples pueden aumentar la variación entre las características.
El material también es importante. Un material que se deforma durante el mecanizado puede dificultar el control de las dimensiones finales. Una pieza que no se pueda inspeccionar fácilmente puede entrañar riesgos ocultos, incluso si el proceso de mecanizado es estable.
La planificación de las tolerancias debe centrarse en la función. Si se está barajando un valor de ±0,015 mm, hay que confirmar que la característica requiere ese nivel de control y que el plan de mecanizado e inspección puede garantizarlo.
Factores de coste, tolerancia y plazo de entrega
El coste, la tolerancia y el plazo de entrega están relacionados entre sí. Un diseño con muchas características muy precisas puede requerir más configuraciones, cortes más lentos, inspecciones adicionales y más revisiones. Un diseño más sencillo, con puntos de referencia claros, puede avanzar más rápidamente en las fases de mecanizado e inspección.
En el ámbito de la robótica, la decisión sobre los costes debe tener en cuenta la iteración. Una pieza prototipo que resulte barata de mecanizar pero difícil de modificar puede ralentizar el proyecto. Un diseño modular de las piezas puede suponer un mayor coste por unidad, pero reduce el riesgo de tener que rediseñarlas.
Factores que influyen en los costes del mecanizado CNC a medida para la robótica
Entre los factores que influyen en los costes del mecanizado CNC a medida para robótica se incluyen el material, el tamaño de la pieza, la complejidad geométrica, el nivel de tolerancia, el número de configuraciones, el acabado superficial y los requisitos de inspección.
Entre los principales factores que influyen en los costes se encuentran:
- Tiempo de mecanizado prolongado debido a cavidades profundas o a una gran retirada de material
- Tolerancias muy ajustadas en muchas características
- Varias configuraciones para llegar a diferentes públicos
- Sujeción de piezas complicada
- Gran carga administrativa derivada de las inspecciones
- Disponibilidad de material
- Necesidades de acabado
- Cambios en el diseño entre iteraciones
Las piezas de robot a medida suelen ser más caras cuando el diseño no es estable. Si el robot aún se encuentra en fase de pruebas, los compradores deben tener en cuenta que las modificaciones afectarán al coste y al calendario.
Cómo influye el peso de las piezas en el rendimiento de los robots industriales
El impacto del peso de las piezas en el rendimiento de los robots industriales está relacionado con la masa en movimiento. Los brazos, los eslabones, las pinzas y los efectores finales más pesados pueden afectar a la aceleración, al aprovechamiento de la carga útil, al consumo energético y a la respuesta dinámica. Las investigaciones presentadas respaldan el uso de materiales como el aluminio y los plásticos en aquellos casos en los que se requiere un diseño ligero.
La reducción de peso no debe mermar la rigidez necesaria. Un eslabón más ligero que se flexione en exceso puede reducir la repetibilidad. Un dedo de la pinza más ligero que se desgaste o se doble puede provocar errores de manipulación. El objetivo del diseño no es únicamente alcanzar el peso mínimo, sino lograr una reducción de peso útil sin perder funcionalidad.
Planificación de tolerancias: cuándo puede ser importante una tolerancia de ±0,015 mm y cuándo hay que verificar los requisitos
Una tolerancia cercana a ±0,015 mm puede ser importante para los ajustes de los rodamientos, los orificios de precisión, las interfaces de engranajes, la alineación de ejes y los puntos de referencia relacionados con los sensores. También puede ser importante cuando varios ejes de un robot se superponen y pequeños errores pueden afectar a la posición final de la herramienta o la pinza.
Este nivel de tolerancia debe verificarse antes de aplicarlo. El valor facilitado procede de una única fuente, por lo que no debe considerarse una norma por defecto. Hay que preguntarse si la característica afecta realmente al movimiento, si el material y la geometría pueden cumplir con la tolerancia y si la inspección puede demostrarlo.
Es posible que los elementos menos críticos no requieran este nivel de control. Los orificios de holgura, las cavidades de aligeramiento, las tapas y las superficies no de posicionamiento suelen poder someterse a requisitos menos estrictos si no afectan al montaje ni al movimiento.
Tabla: Factores de coste, tolerancia, material, preparación, inspección e iteración
| Factor | ¿Qué es lo que aumenta la dificultad? | Qué verificar |
|---|---|---|
| Coste | Geometría compleja, tolerancias estrictas, material difícil, acabado adicional | ¿Qué características son realmente fundamentales? |
| Tolerancia | Paredes delgadas, múltiples configuraciones, herramientas largas, material inestable | Esquema de datos y acceso para la inspección |
| Material | Peso objetivo, carga necesaria, maquinabilidad, disponibilidad | Idoneidad para el movimiento y el montaje |
| Configurar | Piezas con muchas caras y formas difíciles de sujetar | Sujeción de piezas y secuencia de operaciones |
| Inspección | Agujeros ocultos, cavidades profundas, numerosas dimensiones críticas | Método de medición y criterios de aceptación |
| Iteración | Cambios frecuentes en el diseño, requisitos poco claros | Plan de prototipos y control de revisiones |
Esta tabla puede utilizarse durante la revisión del diseño antes de enviar los planos o los archivos CAD para su mecanizado.
Aplicaciones y casos de uso de los componentes robóticos mecanizados con CNC
Los componentes robóticos mecanizados con CNC se utilizan en diferentes tipos de robots, entre los que se incluyen los robots industriales, los robots colaborativos, la automatización a medida, los sistemas de pinzas, los sistemas de inspección y los robots móviles o agrícolas. El nexo común es el control mecánico: las piezas deben encajar, moverse y repetir sus movimientos en condiciones definidas.
Según el IFR World Robotics 2025 Según el informe, las instalaciones mundiales de robots industriales alcanzaron las 542 000 unidades en 2024, más del doble que hace una década, y las instalaciones anuales superaron las 500 000 unidades por cuarto año consecutivo. Su adopción se extiende mucho más allá de los sectores tradicionales de la automoción y la industria aeroespacial, y el procesamiento de alimentos, la agricultura y la electrónica se encuentran entre las áreas de aplicación en expansión que ahora impulsan la demanda de componentes robóticos mecanizados de precisión.
Brazos robóticos industriales, articulaciones, engranajes y carcasas estructurales
Los brazos de los robots industriales utilizan componentes mecanizados con CNC en aquellos casos en los que la resistencia, la repetibilidad y el ajuste en el montaje son factores importantes. Se pueden mecanizar los eslabones del brazo, las carcasas de las articulaciones, los engranajes, los ejes, los soportes y las placas de montaje.
Las carcasas estructurales protegen los motores, los engranajes, los cojinetes y los sensores, al tiempo que sirven para fijarlos en su posición. Dado que las carcasas suelen combinar superficies de montaje externas y cavidades internas, es necesario controlar minuciosamente los puntos de referencia. Si la carcasa no es la adecuada, es posible que muchas otras piezas se puedan montar, pero que la unión no funcione correctamente.
Retos de fabricación en los componentes de los robots colaborativos
Los retos de fabricación de los componentes de los robots colaborativos suelen estar relacionados con un diseño compacto, formas externas lisas, estructuras ligeras y una alta uniformidad en el montaje. Los cobots pueden presentar un espacio reducido en torno a las articulaciones, los sensores y el cableado. Esto puede dificultar el acceso de las herramientas y la inspección.
Los cobots también prestan mayor atención al movimiento controlado y a la fiabilidad de los sensores. La colocación de los sensores, el tendido de los cables y la alineación de las articulaciones deben tenerse en cuenta desde las primeras fases del diseño. Un pequeño cambio en el mecanizado cerca de un sensor o una articulación puede afectar a la calibración o al montaje.
Robótica CNC en los sectores de la automoción, la industria aeroespacial, la industria alimentaria y la agricultura
La robótica CNC está presente en varios sectores. Los sectores de la automoción y el aeroespacial son usuarios tradicionales del mecanizado de precisión y la automatización. En la industria alimentaria, la robótica puede utilizarse para cortar en lonchas, manipular o envasar, donde la higiene y la repetibilidad de los movimientos son fundamentales. En la agricultura, los sistemas robóticos pueden emplearse para la siembra, la cosecha, las tareas de manipulación y los procesos automatizados de carga y descarga.
Para los compradores, el sector no modifica los controles básicos de viabilidad. La geometría, el material, la tolerancia, el acabado superficial y la inspección siguen siendo los factores que determinan si una pieza puede mecanizarse con éxito. Lo que cambia es el entorno operativo y la carga que supone la validación.
Notas sobre el caso práctico: pinzas eléctricas, robótica de enjambre, fresado robotizado y componentes de brazos robóticos
Varios de los temas tratados en los casos de la investigación facilitada resultan útiles para la toma de decisiones.
Las pinzas eléctricas demuestran cómo la manipulación programable destaca a la hora de automatizar tareas repetitivas, como la carga, y reduce la necesidad de utilizar herramientas de sujeción a medida en operaciones CNC con gran variedad de productos. Esto permite cambios más rápidos cuando varían los tamaños de las piezas, lo que lo hace ideal para el uso de robots en la alimentación de máquinas.
La robótica de enjambre demuestra cómo varios robots pueden llevar a cabo tareas de montaje o logística a gran escala mediante un funcionamiento coordinado. Su valor reside en la escalabilidad y la redundancia, pero las piezas mecánicas siguen necesitando interfaces repetibles y un montaje fiable.
El fresado con robots demuestra que los robots articulados pueden realizar operaciones continuas de fresado, inspección y alimentación optimizada de la máquina en algunas tareas de gran volumen o a gran escala. La limitación radica en la rigidez y la precisión en comparación con las máquinas CNC tradicionales.
El mecanizado CNC de componentes para brazos robóticos permite una rápida iteración de prototipos y la producción de brazos, articulaciones, engranajes y carcasas a partir de materiales como el acero, el aluminio y los plásticos. La decisión sigue dependiendo de la geometría, la carga, la tolerancia y la inspección.
Guía de decisión: Cómo evaluar el mecanizado CNC para la robótica
La evaluación del mecanizado CNC para la robótica debe partir de la función del robot, y no del proceso de fabricación. La pieza debe analizarse teniendo en cuenta la carga de movimiento, los requisitos de tolerancia, la elección del material, el acabado superficial, la capacidad del proveedor y el plan de inspección.
El mecanizado CNC ofrece mejores resultados cuando la pieza requiere precisión, resistencia, un montaje repetible o una iteración rápida sin necesidad de utillaje específico. Puede resultar menos adecuado cuando la geometría es inaccesible para las herramientas de corte, cuando el plan de tolerancias no es realista o cuando no se ha revisado el diseño en lo que respecta a la sujeción de la pieza y la inspección.
Cuándo se necesitan engranajes a medida en los sistemas robóticos
Cuando se necesitan engranajes a medida en sistemas robóticos, suele ser por motivos relacionados con el embalaje, el control de movimiento, la transmisión de par o la integración con un eje o una carcasa no estándar. Es posible que los engranajes estándar no se adapten al espacio disponible o a la disposición de montaje.
Se debe considerar el uso de engranajes a medida cuando:
- La articulación del robot requiere una disposición específica de los engranajes
- El presupuesto disponible es ajustado
- El eje, el diámetro interior o el cubo no se ajustan a las normas estándar
- La alineación de los engranajes debe coincidir con la carcasa a medida
- Las pruebas de prototipos requieren cambios rápidos en el diseño
Antes de dar el visto bueno, comprueba no solo el engranaje, sino también el eje de acoplamiento, los cojinetes, la carcasa y el plan de inspección.
¿Qué deben comprobar los compradores antes de dar el visto bueno a una pieza de robot mecanizada con CNC?
Antes de dar su aprobación, los compradores deben confirmar que el proveedor haya fabricado piezas similares, que pueda inspeccionar los puntos de referencia y las características críticas con el equipo adecuado, y que pueda vincular los controles durante el proceso con la verificación final. Se debe revisar el control de revisiones, la trazabilidad de los materiales y los procesos, la secuencia de instalación de los insertos y de los tratamientos superficiales, y si los resultados del primer artículo reflejan la misma estrategia de referencia utilizada en el montaje. La aprobación debe basarse en la capacidad demostrada para mecanizar e inspeccionar de forma coherente la geometría y el material elegidos, y no solo en una respuesta nominal a la solicitud de presupuesto.
Entre las comprobaciones importantes se incluyen:
- Las características fundamentales están claramente identificadas
- Las tolerancias se asignan según la función
- El esquema de referencia se ajusta al uso en el ensamblaje
- El material se adapta a las necesidades de carga, peso y mecanizado
- El acabado de la superficie se define en aquellos puntos en los que afecta al movimiento o al asentamiento
- Los soportes de los sensores y las características de las uniones se refieren a las mismas referencias
- El método de inspección es claro
- Se ha establecido un control de revisiones para los prototipos
El comprador también debe confirmar si la pieza es un prototipo, una pieza de transición o un componente de producción. Cada fase conlleva un riesgo diferente.
¿Cuándo es más adecuado el mecanizado CNC para prototipos robóticos y series pequeñas?
El mecanizado CNC suele ser muy adecuado para prototipos y series pequeñas, ya que la geometría puede modificarse sin necesidad de utillaje fijo; sin embargo, el paso a la producción en serie suele cambiar esta decisión. A medida que aumenta el volumen, los equipos deben revisar el momento de la congelación del diseño, rediseñar los dispositivos de sujeción y hacer que la tecnología CNC sea accesible para los fabricantes más pequeños mediante la racionalización de las tolerancias y la planificación de inspecciones repetibles, así como valorar si otro proceso resulta más económico para las características no críticas. Una pieza prototipo que sea técnicamente mecanizable no es automáticamente la solución de producción adecuada.
Resulta especialmente útil para brazos personalizados, dedos de pinza, soportes para sensores, carcasas de articulaciones y engranajes. Puede resultar menos eficiente para piezas de gran volumen si, una vez que el diseño se ha estabilizado, existe otro proceso capaz de cumplir con las mismas tolerancias y requisitos de material.
Compara el mecanizado CNC con otras alternativas antes del lanzamiento. Utiliza la impresión 3D para iteraciones rápidas o formas complejas sometidas a cargas reducidas; la fundición o el moldeo cuando el volumen justifique la inversión en utillaje; la fabricación con chapa para protecciones y cubiertas; y los artículos estándar de catálogo cuando los rodamientos, las cajas de engranajes, los carriles o los perfiles ya cumplan los requisitos de interfaz y carga. Opte por el mecanizado a medida cuando la pieza deba garantizar la alineación, el ajuste de los rodamientos, la rigidez o unas dimensiones de embalaje que las piezas estándar no puedan cumplir.
En el caso de los prototipos, el paso más importante es recabar opiniones. Si una unión mecanizada se atasca o un dedo de la pinza se desgasta, en la siguiente revisión se debe actualizar el modelo CAD, el plan de tolerancias o la elección del material.
Matriz de decisión: material, tolerancia, carga de movimiento, acabado superficial, capacidad del proveedor, plan de inspección
| Área de decisión | Utiliza el mecanizado CNC cuando | Revísalo detenidamente cuando |
|---|---|---|
| Material | El acero, el aluminio o los plásticos se adaptan a las necesidades de carga y mecanizado | El peso, el desgaste o una carga elevada ponen a prueba los límites del material |
| Tolerancia | Las características críticas requieren un ajuste controlado y repetibilidad | Se aplican tolerancias estrictas a las características no críticas |
| Carga dinámica | Esta pieza sirve de soporte para rodamientos, engranajes, ejes o pinzas | Las paredes delgadas o las cavidades reducen la rigidez |
| Acabado superficial | Las superficies de contacto, de apoyo o giratorias requieren un acabado controlado | El acabado es meramente estético, pero aumenta el coste |
| Capacidad de los proveedores | El proceso puede gestionar la geometría, la configuración y la inspección | La pieza requiere muchos ajustes o presenta características difíciles de medir |
| Plan de inspección | Las dimensiones críticas son medibles | Las características ocultas o los datos poco claros suponen un riesgo de aceptación |
| Iteración | Se prevén cambios en el diseño | Las revisiones son frecuentes, pero los requisitos no están claros |
En resumen, el mecanizado CNC para robótica es una opción muy válida cuando la pieza debe controlar el movimiento, el ajuste o la repetibilidad. Debe evitarse o rediseñarse cuando no se pueda acceder a la geometría, la pieza sea demasiado flexible para mantener la tolerancia o el plan de tolerancias sea más estricto de lo que requiere la función.
Preguntas frecuentes
¿Qué piezas de un robot suelen mecanizarse con CNC?
El mecanizado CNC para robótica permite fabricar piezas fundamentales de los robots, como brazos, bielas, articulaciones, engranajes, carcasas, dedos de las pinzas y soportes para sensores. Estas unidades clave determinan el ajuste mecánico, la estabilidad del movimiento, la alineación estructural y la transferencia de carga en los conjuntos robóticos. Cada interfaz de movimiento y montaje depende de una fabricación precisa para mantener una repetibilidad y un rendimiento de montaje constantes. Los componentes mecanizados de calidad también prolongan la vida útil y garantizan un funcionamiento fiable en sistemas robóticos industriales y colaborativos.
¿Cuáles son los mejores materiales para fabricar piezas robóticas ligeras?
Las piezas de aluminio ligero son la mejor opción para las estructuras robóticas, ya que combinan una masa reducida, rigidez y una excelente maquinabilidad para los componentes móviles. El acero es adecuado para aplicaciones con cargas elevadas y alto desgaste, mientras que los plásticos especiales funcionan bien para cubiertas y soportes robóticos no estructurales sometidos a cargas reducidas. La selección de materiales se adapta a las exigencias de carga útil, la velocidad de movimiento y las condiciones ambientales para optimizar el rendimiento general del robot. La elección adecuada de la aleación evita la flexión, la fatiga y el peso innecesario que podrían reducir la eficiencia de movimiento del robot.
¿Qué tolerancia se requiere para las articulaciones robóticas?
Los requisitos de tolerancia varían en función de la función de la articulación, el ajuste del cojinete, la alineación de los engranajes y la acumulación de tolerancias de montaje en los diseños robóticos. Las articulaciones robóticas mecanizadas con precisión mediante CNC se someten a un estricto control dimensional para preservar la precisión de posicionamiento y garantizar un movimiento rotacional fluido. En robótica avanzada se cita un valor de referencia de precisión de ±0,015 mm, aunque este debe validarse en función del material, la geometría y la capacidad del proveedor. Unas tolerancias bien planificadas evitan la desalineación, el desgaste y la deriva de calibración en las estructuras de los robots articulados.
¿Cómo contribuye el mecanizado CNC al funcionamiento de los robots colaborativos?
El mecanizado CNC permite crear carcasas compactas, soportes para sensores, piezas para pinzas y enlaces estructurales diseñados específicamente para configuraciones de robots colaborativos. El ajuste dimensional preciso y la alta repetibilidad permiten un movimiento seguro y fluido para la interacción entre humanos y robots en entornos de trabajo. El proceso también facilita la creación rápida de prototipos y la personalización de lotes pequeños, lo que acelera la iteración en el diseño de cobots y la optimización estructural. La fiabilidad en la precisión de las piezas garantiza la estabilidad a largo plazo y una amplia adopción industrial de los robots colaborativos modernos.
¿Componentes robóticos a medida o en serie?
Los engranajes a medida para robots son necesarios cuando las piezas estándar no se adaptan a espacios reducidos, a tamaños de eje específicos o a necesidades especializadas de transmisión de par. Los componentes disponibles en el mercado se adaptan a las estructuras robóticas generales, lo que reduce los costes de fabricación y acorta significativamente los plazos de entrega de los proyectos. Los ingenieros evalúan las limitaciones de espacio, los requisitos de carga y la precisión de alineación para decidir entre piezas mecanizadas a medida y piezas prefabricadas. La elección adecuada equilibra el rendimiento, el presupuesto, el plazo de entrega y el mantenimiento futuro de los sistemas de automatización robótica completos.
Referencias
https://www.asminternational.org