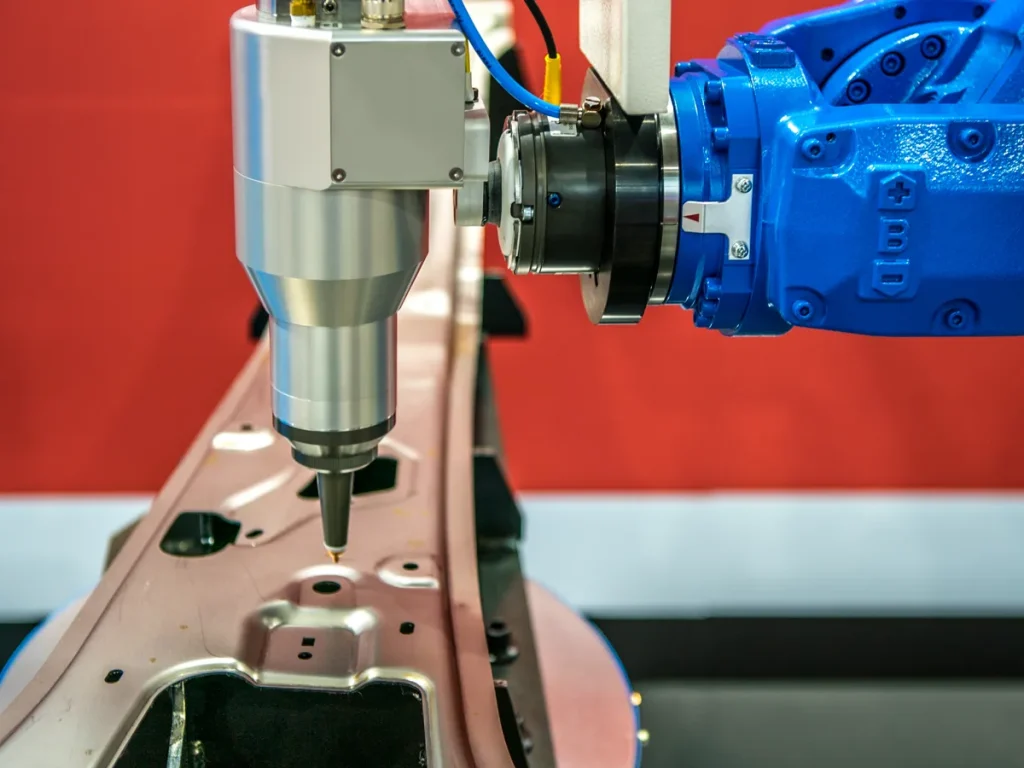
La lavorazione CNC per la robotica viene utilizzata quando un componente robotico richiede una geometria controllata, un accoppiamento ripetibile e una resistenza del materiale che possono risultare difficili da ottenere con metodi di produzione meno precisi.
È normale che le parti chiave della macchina, tra cui bracci, giunti, ingranaggi, alloggiamenti, pinze, dispositivi di fissaggio e supporti per sensori, siano soggette a usura, poiché queste parti influenzano il movimento, la rigidità, l’allineamento e le prestazioni di assemblaggio.
Per i team di ingegneri, la questione principale non è se la lavorazione CNC sia in grado di realizzare un componente. La domanda più pertinente è se il progetto sia adatto alla lavorazione con le tolleranze, il materiale, i costi e i tempi di consegna richiesti. Un giunto robotico con sedi per cuscinetti, interfacce per ingranaggi, supporti per motori e alloggiamenti per sensori può essere tecnicamente lavorabile, ma il progetto potrebbe comunque richiedere modifiche per consentire l’accesso degli utensili, il controllo della configurazione, l’ispezione o l’adattamento in fase di assemblaggio.
La presente guida si concentra su aspetti pratici fondamentali: quando è necessaria la lavorazione CNC, in quali casi può comportare dei rischi, quali materiali vengono comunemente presi in considerazione e cosa devono verificare gli acquirenti prima di approvare un componente robotico lavorato con tecnologia CNC.
Che cos’è la lavorazione CNC per la robotica e perché è importante
L'integrazione del CNC nella produzione si basa sulla lavorazione CNC come processo di produzione sottrattiva, in cui un utensile da taglio asporta materiale da un pezzo in lavorazione seguendo percorsi programmati. Nella robotica, la lavorazione CNC viene utilizzata per produrre componenti meccanici che devono mantenere la propria forma durante il movimento, sotto carico e in caso di assemblaggi ripetuti.
Il valore principale della lavorazione CNC nel campo della robotica è il controllo. I componenti dei robot richiedono spesso fori, forature, cavità, scanalature, superfici di montaggio e interfacce rotanti per allinearsi tra loro. Se queste caratteristiche subiscono uno spostamento, il robot potrebbe perdere la ripetibilità, generare un attrito eccessivo o trasmettere il carico nella direzione sbagliata.
La lavorazione CNC è particolarmente utile per i prototipi e le piccole serie, poiché spesso è possibile apportare modifiche al progetto tramite aggiornamenti CAD/CAM anziché ricorrere a utensili dedicati. Ciò favorisce lo sviluppo di robot personalizzati, in cui la lunghezza del braccio, la disposizione delle articolazioni, il design della pinza o la posizione dei sensori possono variare durante la fase di collaudo.
Quando è necessaria la lavorazione CNC per i giunti robotici
La lavorazione CNC è solitamente necessaria per i giunti robotici quando il componente controlla la rotazione, la posizione dei cuscinetti, l’allineamento dei motori, l’ingranamento degli ingranaggi o il trasferimento del carico. Queste caratteristiche sono sensibili, poiché piccoli errori possono sommarsi lungo l’intero braccio del robot.
Un componente di giunto può richiedere una lavorazione CNC quando presenta le seguenti caratteristiche:
- Sedi dei cuscinetti o fori degli alberi
- Superfici di montaggio del motore e del riduttore
- Caratteristiche dell'allineamento degli ingranaggi
- Fori per perni di centraggio o elementi di posizionamento di precisione
- Superfici di montaggio dei sensori
- Tasche strutturali che riducono il peso ma devono garantire la rigidità
- Superfici di accoppiamento che controllano la perpendicolarità o il parallelismo
La decisione fondamentale è stabilire se l'elemento di giunzione influisca sulla precisione del movimento o se abbia solo una funzione strutturale generale. Un rivestimento non critico può consentire un controllo meno rigoroso. L'alesaggio di un cuscinetto o l'interfaccia di un ingranaggio richiedono solitamente un controllo più rigoroso, poiché influenzano direttamente il movimento.
Perché la ripetibilità è importante nella lavorazione CNC per la robotica
La ripetibilità è la capacità di un robot di tornare nella stessa posizione in risposta allo stesso comando. I componenti lavorati con macchine a controllo numerico (CNC) garantiscono la ripetibilità mantenendo le interfacce meccaniche costanti da un pezzo all’altro.
Il motivo per cui la ripetibilità è importante nella lavorazione CNC per la robotica si riduce all’accumulo delle tolleranze. Un braccio robotico può comprendere diversi bracci, giunti, alberi, ingranaggi e alloggiamenti. Ogni singolo componente può essere accettabile di per sé, ma piccole variazioni possono sommarsi nell’insieme dell’assemblaggio. Se l’accumulo delle tolleranze non viene controllato, il punto centrale dell’utensile, la posizione della pinza o il campo visivo del sensore potrebbero subire uno spostamento.
La ripetibilità influisce anche sulla manutenzione e sulla sostituzione. Se in un secondo momento si sostituisce un alloggiamento di giunzione lavorato a macchina, il nuovo componente deve adattarsi agli stessi cuscinetti, motori ed elementi di fissaggio senza compromettere l’allineamento dell’assieme. Ecco perché la pianificazione delle ispezioni è importante tanto quanto la lavorazione stessa.
In che modo le tolleranze ristrette influenzano le prestazioni dell'assemblaggio robotizzato
Le tolleranze strette dovrebbero essere assegnate in base alla funzione e al tipo di controllo, non applicate in modo uniforme. I limiti dimensionali da soli non regolano le relazioni tra gli elementi; pertanto, gli elementi di rotazione e di posizionamento potrebbero richiedere controlli di posizione, eccentricità, perpendicolarità o planarità anziché limitarsi alle sole dimensioni ±. Ad esempio, gli elementi relativi a cuscinetti e alberi dipendono dalla coassialità e dall’eccentricità, mentre le superfici di montaggio di motori e riduttori dipendono dalla planarità e dalla perpendicolarità per mantenere l’allineamento sotto il precarico di assemblaggio.
Una delle fonti citate afferma che lavorazione CNC di precisione è in grado di garantire tolleranze di circa ±0,015 mm per applicazioni robotiche. Questo valore deve essere considerato come un obiettivo specifico per ogni progetto, non come una regola universale. È necessario verificarlo in base al materiale, alla geometria, alla configurazione della macchina, al metodo di ispezione e alle capacità del fornitore.
Tolleranze più strette spesso comportano un aumento dei costi e dei tempi di consegna, poiché possono richiedere una regolazione più accurata, una lavorazione più lenta, ispezioni aggiuntive o finiture supplementari. La decisione dovrebbe basarsi sulla funzione. Vale la pena restringere una tolleranza quando ciò garantisce la precisione del movimento, la durata dei cuscinetti, il contatto degli ingranaggi o l’allineamento dell’assemblaggio. Potrebbe invece non valerne la pena nel caso di coperture estetiche, cavità di gioco o superfici non di riferimento.
Immagine: Mappa annotata dei componenti di un robot — Bracci, giunti, ingranaggi, alloggiamenti, pinze
Una mappa utile dei componenti di un robot dovrebbe classificare le parti in base alla funzione, non solo alla forma:
| Area robotica | Caratteristiche tipiche della lavorazione CNC | Perché sono importanti |
|---|---|---|
| Bracci e maglie | Tasche, facce terminali, fori per elementi di fissaggio, passacavi | Controllo del peso, della rigidità e dell'adattamento durante l'assemblaggio |
| Giunti | Fori dei cuscinetti, supporti motore, interfacce del cambio | Controllo della rotazione, dell'allineamento e della ripetibilità |
| Ingranaggi | Denti, mozzi, fori, scanalature di chiavetta o elementi di riferimento | Controllo della trasmissione della coppia e della fluidità del movimento |
| Alloggiamenti | Superfici di montaggio, coperture, tasche interne | Proteggere i componenti e individuare i gruppi |
| Pinze | Dita, ganasce, adattatori, piastre di montaggio | Controllo del contatto dei componenti e flessibilità di commutazione |
| Supporti per sensori | Piccoli fori, superfici di riferimento, staffe | Campo visivo del sensore di controllo e posizione di misurazione |
Questo tipo di mappa annotata aiuta gli acquirenti a decidere quali caratteristiche richiedono un'ispezione e quali possono invece avvalersi delle tolleranze di lavorazione standard.

Fattibilità: è possibile lavorare un componente robotico con un centro di lavoro CNC?
La maggior parte dei componenti robotici può essere lavorata con macchine a controllo numerico (CNC) purché la geometria consenta l'accesso all'utensile e il materiale possa essere tagliato in modo stabile. I problemi di fattibilità derivano solitamente da pareti sottili, cavità profonde, caratteristiche interne, angoli interni acuti, sezioni lunghe non supportate o requisiti di tolleranza non compatibili con il progetto del pezzo.
Un pezzo realizzabile non è solo quello che può essere tagliato. Deve anche poter essere fissato saldamente durante la lavorazione, ispezionato al termine della lavorazione e assemblato senza dover forzare l'inserimento delle parti di accoppiamento.
Considerazioni progettuali relative ai componenti robotici lavorati con macchine CNC
Le considerazioni progettuali relative alla lavorazione robotizzata e ai componenti robotici lavorati a CNC dovrebbero partire dalla funzione. È necessario identificare le superfici che controllano il movimento, il carico, la tenuta, il fissaggio o il rilevamento. Queste dovrebbero diventare i principali punti di riferimento e di ispezione.
Tra le verifiche progettuali più importanti figurano:
- Se gli utensili da taglio sono in grado di raggiungere tutte le caratteristiche
- Se gli angoli interni consentono di utilizzare un raggio realistico dell'utensile
- Se le pareti sottili possano deformarsi durante la lavorazione
- Se sono le tasche profonde a causare vibrazioni o se il problema è una scarsa evacuazione dei trucioli
- Se sia possibile praticare fori da direzioni accessibili
- Se le quote di tolleranza sono legate ai sistemi di riferimento funzionali
- Se il pezzo può essere serrato senza danneggiare le superfici critiche
I progettisti dovrebbero evitare di assegnare tolleranze strette a ogni elemento. Le tolleranze strette dovrebbero essere riservate alle interfacce che influiscono sul movimento, sull'allineamento o sull'assemblaggio. Ciò rende il componente più facile da produrre e da ispezionare.
In che modo le caratteristiche di montaggio dei sensori influenzano la lavorazione robotizzata dei pezzi
I supporti per sensori possono comportare una maggiore complessità di lavorazione, poiché spesso presentano fori di piccole dimensioni, superfici di precisione e accesso limitato. Telecamere, encoder, sensori di prossimità e sensori di forza possono richiedere una posizione controllata rispetto al giunto, alla pinza o all’effettore terminale.
Il modo in cui le caratteristiche di montaggio dei sensori influenzano la lavorazione robotizzata dei pezzi dipende dalla posizione e dalla tolleranza. Il montaggio di una staffa per sensore su una superficie aperta può risultare semplice. Una sede per sensore all’interno dell’alloggiamento di un giunto può invece richiedere utensili più lunghi, più configurazioni o un accesso speciale per l’ispezione.
Il rischio principale è la mancata corrispondenza dei punti di riferimento. Se il supporto del sensore viene lavorato con una determinata configurazione, mentre il foro di accoppiamento viene lavorato con un’altra, la posizione relativa potrebbe subire uno spostamento, a meno che il piano di configurazione non controlli entrambe le caratteristiche. Per i robot guidati da sensori, ciò può causare problemi di calibrazione anche se ogni singola caratteristica rispetta la propria tolleranza dimensionale.
Sfide legate alla lavorazione meccanica di componenti leggeri per bracci robotici
I bracci robotici leggeri riducono la massa in movimento, ma possono risultare difficili da lavorare. Le difficoltà legate alla lavorazione dei componenti dei bracci robotici leggeri derivano spesso dalle pareti sottili, dalle lunghe campate e dalle cavità di alleggerimento.
Le sezioni sottili possono vibrare durante il taglio. I collegamenti lunghi possono essere difficili da mantenere senza deformazioni. Le cavità di grandi dimensioni possono ridurre la rigidità, per cui il pezzo potrebbe spostarsi durante la lavorazione o successivamente sotto carico. Questi problemi possono influire sulla planarità, sulla posizione dei fori e sull’allineamento delle superfici di accoppiamento.
Un approccio progettuale pratico consiste nel ridurre il peso solo laddove ciò non comprometta i percorsi di carico critici. I progettisti dovrebbero inoltre valutare se l’elemento possa essere lavorato secondo una sequenza stabile. Se la geometria finale diventa troppo flessibile prima che tutte le caratteristiche critiche siano state completate, il controllo delle tolleranze diventa più difficile, limitando la possibilità di far funzionare le macchine in modo continuo.
Lista di controllo: Valutazione della fattibilità CNC in termini di geometria, accessibilità, materiale e adattamento dell'assemblaggio
| Area di revisione | Cosa controllare | Rischio di decisione |
|---|---|---|
| Geometria | Pareti sottili, cavità profonde, angoli interni acuti, elementi nascosti | Problemi di accesso agli utensili o di deflessione |
| Attrezzatura di lavorazione | Superfici di serraggio piane, pezzo stabile, sequenza di attrezzaggio | Movimento o deformazione di una parte |
| Materiale | Lavorabilità, requisiti di resistenza, obiettivo di peso | Finitura superficiale scadente o massa eccessiva |
| Tolleranza | Riferimenti funzionali, accoppiamenti dei cuscinetti, allineamento degli ingranaggi, posizione dei sensori | Disallineamento o onere ispettivo elevato |
| Montaggio a incastro | Superfici di accoppiamento, elementi di fissaggio, tasselli, canaline per cavi | Rilavorazione durante l'assemblaggio |
| Ispezione | Accesso per la misurazione, dimensioni critiche definite | Caratteristiche fondamentali non verificate |
| Iterazione | Modifiche progettuali previste a seguito dei test | Costi più elevati se il progetto non è modulare |
La presente lista di controllo deve essere compilata prima di formulare un preventivo o di approvare la produzione, in particolare per giunti, bracci e alloggiamenti di precisione.
Come funziona la lavorazione CNC dei componenti per robot
La lavorazione CNC dei componenti per robot inizia con la geometria CAD. Il software CAM converte il progetto in percorsi utensile. Questi percorsi utensile vengono convertiti in istruzioni per la macchina, spesso denominate “codice G”. La macchina procede quindi al taglio del pezzo, dopodiché un controllo verifica se il pezzo rispetta le dimensioni richieste.
Nel campo della robotica, il processo dovrebbe prevedere un feedback relativo all’assemblaggio. Se un giunto si blocca, un ingranaggio presenta un contatto insufficiente o un sensore necessita di una regolazione della calibrazione, tale feedback dovrebbe essere ricondotto al modello CAD e al piano delle tolleranze.
Confronto tra tornitura e fresatura CNC per componenti di robot
Un confronto tra Tornitura CNC La fresatura dei componenti per robot parte dalla forma del pezzo. La tornitura viene utilizzata per i pezzi che ruotano attorno a un asse durante la lavorazione. La fresatura viene utilizzata per pezzi prismatici, a forma di piastra, con cavità o a più facce.
| Processo | Parti comuni dei robot | La migliore vestibilità | Limiti principali |
|---|---|---|---|
| Tornitura CNC | Alberi, boccole, distanziatori, mozzi circolari | Elementi rotondi o assialsimmetrici | Meno adatto a tasche esterne complesse |
| Fresatura CNC | Collegamenti, alloggiamenti, dita di presa, staffe, piastre di giunzione | Superfici piane, tasche, fessure, schemi di foratura | L'accesso agli utensili e il numero di configurazioni possono limitare la geometria |
| Tornitura e fresatura combinate | Mozzi con ingranaggi, alberi di giunzione con superfici piatte o fori | Parti con caratteristiche sia rotonde che fresate | È necessaria una maggiore pianificazione per i sistemi di riferimento e le ispezioni |
La classe della macchina dovrebbe basarsi sull'insieme delle caratteristiche, non solo sul nome del pezzo. I pezzi prismatici semplici possono essere lavorati con macchine a 3 assi; le macchine a 4 assi con indicizzazione possono ridurre la necessità di riposizionamento per le caratteristiche su più lati, mentre l’uso di macchine a 5 assi è spesso giustificato quando si devono lavorare facce composte, fori angolati o caratteristiche difficili da raggiungere che devono rimanere legate alla stessa struttura di riferimento. Ogni configurazione aggiuntiva aumenta il rischio di spostamenti posizionali; pertanto, gli acquirenti dovrebbero verificare se le caratteristiche critiche possano essere realizzate e ispezionate con un unico serraggio o tramite trasferimenti controllati del punto di riferimento.
Spesso la scelta non si limita a un processo piuttosto che all’altro. Molti componenti robotici richiedono sia lavorazioni di tornitura che di fresatura. L’aspetto fondamentale è definire quali caratteristiche determinano l’allineamento e mantenere tali caratteristiche collegate a un piano di riferimento chiaro.
In che modo gli ingranaggi su misura migliorano il controllo del movimento dei robot
Gli ingranaggi su misura vengono utilizzati quando quelli standard non soddisfano le esigenze del robot in termini di spazio, movimento, carico o integrazione. Il modo in cui gli ingranaggi su misura migliorano il controllo del movimento robotico dipende dal ruolo che essi svolgono nella trasmissione della coppia e nella risposta posizionale.
Potrebbe essere necessario ricorrere a un ingranaggio su misura quando l'articolazione di un robot presenta un ingombro ridotto, un albero di dimensioni non standard, uno schema di montaggio speciale o un rapporto di trasmissione richiesto che non è compatibile con i componenti disponibili in commercio. La lavorazione CNC può supportare lo sviluppo di ingranaggi su misura, in particolare per prototipi e piccole serie in cui l'utilizzo di attrezzature dedicate potrebbe non essere pratico.
Il rischio principale in fase di progettazione non riguarda solo la geometria dei denti. Anche l’allineamento del foro dell’ingranaggio, la geometria del mozzo, le superfici di montaggio e le parti di accoppiamento influiscono sul movimento. Un ingranaggio ben lavorato può comunque funzionare male se la disposizione dell’alloggiamento, dell’albero o dei cuscinetti causa un disallineamento.
In che modo le pinze elettriche favoriscono configurazioni flessibili di robot CNC
Le pinze elettriche consentono configurazioni flessibili dei robot CNC, poiché possono essere programmate per pezzi di diverse dimensioni e automatizzare interamente i flussi di lavoro delle macchine, oltre a svolgere operazioni di carico e scarico. Ciò risulta utile quando una cella di lavorazione deve gestire pezzi diversi anziché un unico prodotto fisso.
Nelle operazioni di lavorazione standard e in quelle a controllo numerico (CNC), le pinze elettriche vengono spesso messe a confronto con quelle pneumatiche, poiché la loro programmabilità può ridurre la necessità di utensili su misura. Ciò è importante nella lavorazione ad alta varietà, dove i frequenti cambi di pezzo possono allungare i tempi di configurazione.
Dal punto di vista della progettazione dei componenti, le pinze di presa comportano esigenze di lavorazione specifiche. Le dita delle pinze, le piastre di adattamento e i blocchi di montaggio potrebbero richiedere una lavorazione CNC per adattarsi alla forma del pezzo e all’interfaccia del robot. È necessario verificare che tali componenti presentino una finitura adeguata delle superfici di contatto, un accesso agevole ai dispositivi di fissaggio e un posizionamento ripetibile.
Diagramma di processo: CAD/CAM, codice G, lavorazione, ispezione, feedback sull’assemblaggio
Un diagramma di processo pratico per i componenti dei robot dovrebbe comprendere cinque fasi collegate tra loro:
- Revisione del modello CAD e delle funzionalità. Vengono individuate le interfacce critiche, tra cui giunti, cuscinetti, ingranaggi, sensori e superfici di montaggio.
- Programmazione CAM e generazione del codice G. I percorsi utensile vengono creati in base al materiale, alla geometria, alla configurazione e alla finitura superficiale richiesta.
- Controllo della lavorazione e dell'allestimento Il pezzo viene tagliato mentre vengono controllati il serraggio, l'accesso dell'utensile e la sequenza delle operazioni.
- Ispezione: le quote critiche vengono misurate in base al disegno o alla definizione basata sul modello.
- Feedback sull'assemblaggio: i risultati relativi all'adattamento, al movimento e all'allineamento vengono esaminati prima della fase successiva di progettazione o della serie di produzione successiva.
Questo ciclo è importante perché i componenti robotici spesso subiscono modifiche dopo i test di movimento.
Materiali per bracci robotici, maglie, giunti e alloggiamenti
La scelta del materiale influisce sul peso, sulla rigidità, sul comportamento durante la lavorazione, sulla finitura superficiale e sul costo. La ricerca presentata individua l’acciaio, l’alluminio e la plastica come materiali comunemente utilizzati per i componenti robotici lavorati con macchine CNC. Ciascun gruppo di materiali soddisfa esigenze meccaniche diverse.
L'alluminio viene spesso preso in considerazione per le strutture leggere. L'acciaio può essere utilizzato nei casi in cui sia richiesta una maggiore resistenza al carico o all'usura. Le materie plastiche possono essere impiegate per coperture, parti soggette a carichi ridotti, elementi isolanti o componenti in cui il peso è un fattore determinante, a seconda delle condizioni meccaniche.
I migliori materiali per i bracci robotici leggeri
I materiali migliori per i bracci robotici leggeri vengono solitamente scelti tenendo conto di un equilibrio tra massa, rigidità, resistenza e lavorabilità. L'alluminio è una scelta comune per i bracci robotici perché consente di ridurre il peso pur permettendo la lavorazione CNC di cavità, superfici di montaggio e schemi di foratura.
La plastica può essere presa in considerazione anche per componenti sottoposti a carichi ridotti o non strutturali, laddove il peso sia un fattore critico. Il suo impiego deve essere verificato in base ai requisiti relativi a carico, calore, usura e fissaggio. L’acciaio risulta meno indicato per i collegamenti leggeri quando la massa in movimento rappresenta il vincolo principale, ma può comunque essere necessario in aree compatte soggette a carichi elevati.
La scelta dovrebbe basarsi sul modo in cui si muove il giunto. Un giunto a braccio lungo che si muove rapidamente potrebbe trarre vantaggio da un peso inferiore. Un componente di giunto corto sottoposto a forze elevate potrebbe invece richiedere un materiale più resistente o più rigido, anche se ciò comporta un aumento della massa.
Scelta tra l'alluminio 6061 e l'alluminio 7075 per i componenti dei robot
La scelta del materiale dipende dal percorso del carico, dall’ambiente, dal metodo di fissaggio, dai punti soggetti a usura e dal piano di finitura. Per i componenti in alluminio, valutare l’esposizione alla corrosione, la sensibilità alla fatica, la resistenza delle filettature, l’eventuale necessità di inserti nei fori filettati, il contatto galvanico con elementi in acciaio e se l’anodizzazione o altre finiture potrebbero influire sulle caratteristiche critiche per l’accoppiamento. Se il componente è soggetto a carichi di serraggio ripetuti, contatto scorrevole o elevate sollecitazioni locali di appoggio, verificare che la lega e la finitura selezionate siano adatte a tale impiego prima dell’approvazione.
Sulla base del ASM Internazionale, la scelta non dovrebbe basarsi esclusivamente sul nome della lega. Gli acquirenti dovrebbero verificare:
- Resistenza e rigidità richieste
- Ciclo previsto di carico e movimento
- Stabilità di lavorazione per sezioni sottili
- Requisiti relativi alla finitura superficiale
- Strategia relativa a elementi di fissaggio e inserti
- Requisiti di ispezione per le caratteristiche critiche
- Impatto sulla disponibilità e sui tempi di consegna
Il punto fondamentale è che la scelta della lega deve garantire sia la lavorabilità che le prestazioni del robot.
Vantaggi dell'alluminio 7075 per i componenti dei bracci robotici: cosa verificare
I componenti dei bracci in alluminio 7075 leggero offrono vantaggi fondamentali per i componenti dei bracci robotici impiegati in applicazioni strutturali in cui il peso è un fattore critico. L'obiettivo progettuale è quello di garantire la leggerezza del braccio, mantenendo al contempo una resistenza sufficiente per il movimento e il carico.
Prima di sceglierlo, i team dovrebbero verificare se il vantaggio si applica effettivamente al componente in questione. Un materiale più resistente non risolve i problemi legati a una geometria inadeguata, a percorsi di carico deboli o a pareti sottili prive di supporto. Potrebbe inoltre influire sulla strategia di lavorazione, sulla finitura, sul controllo qualità e sull’approvvigionamento.
La convalida dovrebbe comprendere una verifica del carico, una verifica dell'assemblaggio e un collaudo del prototipo qualora il componente influisca sulla sicurezza, sulla precisione di movimento o sulla durata. Ciò è particolarmente importante per i bracci, le piastre di articolazione e le strutture delle pinze.
Limiti dell'alluminio nei componenti per robot sottoposti a carichi elevati
L'alluminio presenta dei limiti nei componenti robotici sottoposti a carichi elevati. Potrebbe non essere la scelta migliore nei casi in cui il componente sia sottoposto a carichi concentrati, urti ripetuti, sollecitazioni elevate sui cuscinetti o usura delle superfici di contatto.
I limiti dell'alluminio nei componenti dei robot sottoposti a carichi elevati si manifestano spesso nelle interfacce: sedi dei cuscinetti, supporti degli alberi, supporti degli ingranaggi, fori filettati e punti di contatto delle pinze. La progettazione potrebbe richiedere l'uso di inserti, superfici di appoggio dei cuscinetti più ampie, una geometria diversa o un materiale alternativo.
Se il componente è critico dal punto di vista del carico, la scelta del materiale deve essere valutata tenendo conto dell'intero assemblaggio. Un singolo componente in alluminio può essere conforme al proprio disegno, ma il robot potrebbe comunque non funzionare correttamente se l'insieme dei giunti non è sufficientemente rigido.

Vantaggi e limiti della lavorazione CNC nel campo della robotica
Nell'industria manifatturiera moderna, la lavorazione CNC offre agli ingegneri un controllo preciso sulla geometria, sulle caratteristiche superficiali e sulla scelta dei materiali. È utile per la realizzazione di pezzi su misura, prototipi e componenti di produzione in cui l'adattamento e la ripetibilità sono fondamentali.
Anche i limiti sono importanti. La lavorazione CNC comporta la rimozione di materiale, pertanto la geometria del pezzo deve consentire l’accesso all’utensile. Può rivelarsi costosa quando i pezzi richiedono numerose configurazioni, tolleranze strette su molte superfici, ispezioni complesse o materiali difficili da lavorare. Inoltre, non elimina la necessità di una progettazione meccanica accurata.
Lavorazione CNC vs fresatura robotizzata: compromessi tra precisione, rigidità, flessibilità e costi
La fresatura robotizzata può offrire flessibilità per lavori di grandi dimensioni o meno impegnativi, consentendo agli operatori di controllare le macchine utensili senza intervento manuale nella produzione di pezzi complessi. Tali caratteristiche dipendono dalla rigidità, dalla stabilità termica e dal controllo prevedibile degli utensili, che le macchine CNC dedicate solitamente garantiscono in modo più affidabile. La scelta del processo dovrebbe basarsi sulla categoria delle caratteristiche critiche, non su un’ipotesi generica riguardo all’automazione.
La ricerca citata evidenzia un’importante incertezza: i robot non eguagliano ancora le macchine CNC in termini di rigidità e precisione a livello di micron, ma possono offrire convenienza, adattabilità e valore aggiunto per la prototipazione o per attività meno rigide. Ciò significa che la fresatura robotizzata dovrebbe essere valutata in base al tipo di attività, senza essere considerata un sostituto diretto.
| Fattore | Lavorazione CNC | Fresatura robotizzata |
|---|---|---|
| Esigenza di precisione | Maggiore adattabilità alle funzionalità ad alto livello di controllo | Ideale per attività meno rigide o per lavori più flessibili e di ampia portata |
| Rigidità | Struttura della macchina più robusta | Ridotta rigidità in molte configurazioni |
| Flessibilità | Ottimo grazie alla programmazione e alle attrezzature di fissaggio | Ampio raggio d’azione e flessibilità di percorso |
| Comportamento in termini di costi | La complessità dell'allestimento e della lavorazione incide sui costi | Potrebbe ridurre i costi per alcune attività flessibili o di ampia portata |
| Utilizzo ottimale | Giunti, ingranaggi, alloggiamenti, interfacce di precisione | Operazioni su larga scala di fresatura, rifilatura e attività correlate al controllo qualità |
Per i componenti robotici che controllano l'allineamento dei cuscinetti o l'ingranamento degli ingranaggi, la lavorazione CNC tradizionale rappresenta spesso il punto di partenza più sicuro.
Robot CNC riprogrammabili e modulari per piccole serie e pezzi su misura
I robot CNC riprogrammabili e modulari sono particolarmente efficaci nell’automatizzare l’alimentazione delle macchine CNC e risultano utili nei casi in cui la gamma di prodotti cambi frequentemente. La ricerca citata collega questi sistemi a una riduzione dei tempi di fermo macchina, a una minore necessità di utensili su misura e a un supporto per far fronte alla carenza di manodopera qualificata.
Nella produzione di componenti per la robotica, questo aspetto è particolarmente importante nella realizzazione di prototipi e in piccole serie. Un’officina potrebbe dover lavorare diverse versioni di un dito di presa, di una piastra di collegamento o di un alloggiamento mentre il progetto del robot è ancora in fase di modifica. I sistemi riprogrammabili sono in grado di supportare questo tipo di iterazione.
L'acquirente dovrebbe comunque verificare se l'attrezzatura del fornitore sia in grado di rispettare le tolleranze richieste. La flessibilità è utile, ma non sostituisce la progettazione delle attrezzature, la pianificazione dei controlli o il controllo dei materiali.
Intelligenza artificiale, apprendimento automatico e programmazione CNC basata sul cloud nella produzione robotizzata
L'intelligenza artificiale e l'apprendimento automatico vengono applicati alla robotica CNC per il supporto decisionale in tempo reale, la manutenzione predittiva, l'ottimizzazione dei processi e una programmazione più semplice. La programmazione CNC basata sul cloud può supportare l'accesso remoto, la collaborazione, la sicurezza dei dati e l'analisi dell'andamento delle prestazioni tra i vari stabilimenti.
Per un acquirente, il valore pratico non risiede nell’etichetta del software. Il valore sta nel fatto che la programmazione, i dati di ispezione e il feedback di processo consentano di ridurre gli errori e migliorare la ripetibilità. Ad esempio, i dati di andamento possono aiutare a individuare l’usura degli utensili, la deriva della macchina o le variazioni di processo prima che queste influenzino un lotto di pezzi lavorati dal robot.
Questi strumenti devono essere considerati come un supporto al processo. Non eliminano la necessità di disegni chiari, punti di riferimento controllati e criteri di ispezione ben definiti.
Richiesta di riferimenti: rapporti di settore sulle tendenze nell'automazione robotica CNC
La robotica CNC sta trasformando i flussi di lavoro nel settore manifatturiero, e molte delle tendenze individuate in questo ambito necessitano di prove più solide a livello di settore prima di poter essere utilizzate ai fini della pianificazione degli investimenti. La ricerca presentata evidenzia una crescita nei settori dell’intelligenza artificiale, della programmazione cloud, delle pinze elettriche, della robotica di sciame e delle applicazioni al di fuori dei settori automobilistico e aerospaziale. Tuttavia, in alcuni ambiti mancano dati quantificati sui tassi di adozione o parametri di riferimento sulle prestazioni.
Questo aspetto è importante ai fini del processo decisionale. Un team di progettazione può avvalersi di queste tendenze per orientare la pianificazione futura, ma dovrebbe evitare di dare per scontato che ogni fornitore o stabilimento disponga delle stesse capacità di automazione. Prima di affidarsi a un metodo di automazione, è necessario verificare il processo effettivo, il metodo di ispezione e lo storico delle tolleranze per componenti simili.
Guasti comuni, rischi e problemi di qualità
I componenti dei robot tendono spesso a guastarsi in corrispondenza delle interfacce, non all’interno di geometrie semplici. Fori, superfici di montaggio, elementi degli ingranaggi, staffe dei sensori, elementi di fissaggio e transizioni con pareti sottili meritano un’attenzione particolare.
Tra i rischi più comuni figurano il disallineamento, la finitura superficiale inadeguata, la deformazione dei componenti, l’accumulo di tolleranze e l’usura delle superfici di contatto. Molti di questi rischi possono essere ridotti collegando l’intento progettuale alla produzione e al controllo qualità.
Quali sono le cause del disallineamento dei componenti delle articolazioni del braccio robotico?
Le cause del disallineamento dei componenti delle articolazioni dei bracci robotici sono solitamente una combinazione di fattori legati alla progettazione, alla lavorazione e all’assemblaggio. Un foro potrebbe essere leggermente fuori posizione. Una superficie di montaggio potrebbe non essere sufficientemente piana. Un riduttore o un cuscinetto potrebbero essere forzati in posizione dagli elementi di fissaggio. Piccoli errori possono sommarsi lungo l’intera articolazione.
Tra le cause più comuni figurano:
- Caratteristiche di riferimento non corrispondenti alla funzione di assemblaggio
- Configurazioni multiple senza un controllo adeguato della posizione
- Fori dei cuscinetti e supporti motore ricavati da pezzi con referenze diverse
- Sezioni sottili soggette a spostamenti durante la lavorazione
- Fori di fissaggio utilizzati come elementi di riferimento senza un adeguato controllo
- Caratteristiche dell'ingranaggio o dell'albero non allineate all'asse del giunto
Il disallineamento può manifestarsi sotto forma di attrito, surriscaldamento, rumore, scarsa ripetibilità o usura irregolare degli ingranaggi.
Punti di guasto più comuni nei componenti dei bracci robotici di precisione
I punti più soggetti a guasti nei componenti dei bracci robotici di precisione includono le interfacce dei giunti, i punti di fissaggio, le sedi dei cuscinetti, i supporti degli ingranaggi, le dita della pinza e le staffe dei sensori. Queste aree sono soggette a carichi, movimenti, sollecitazioni di assemblaggio o sensibilità alla calibrazione.
I guasti possono essere di natura meccanica o funzionale. Un componente potrebbe non presentare crepe, ma potrebbe comunque guastarsi consentendo un movimento eccessivo, perdendo l’allineamento o causando uno scostamento del robot dalla posizione prevista. Per questo motivo, l’ispezione dovrebbe concentrarsi sulle caratteristiche che influenzano il movimento e l’assemblaggio, non solo sui difetti visibili.
Rischi legati a una finitura superficiale inadeguata dei componenti dei giunti robotici
La finitura superficiale deve essere adeguata alla funzione dell’interfaccia. Le sedi dei cuscinetti e i piani di posizionamento richiedono un comportamento di appoggio stabile; le parti soggette a scorrimento necessitano di una finitura adatta all’attrito e all’usura; le superfici di tenuta richiedono un contatto uniforme; le aree di contatto delle pinze possono necessitare di una texture controllata per garantire la presa senza danneggiare il componente; infine, i piani di montaggio dei sensori devono evitare ondulazioni che possano alterare l’allineamento o la misurazione. La finitura superficiale è quindi un requisito legato alle prestazioni dell’assemblaggio, non solo un aspetto estetico.
Una finitura inadeguata della sede di un cuscinetto, di una parte dell’albero o di una superficie di accoppiamento può alterare la distribuzione del carico. Può inoltre far percepire il montaggio come troppo stretto o troppo lento, anche quando le dimensioni appaiono accettabili. I requisiti relativi alla finitura superficiale dovrebbero quindi essere stabiliti in base alla funzione e indicati formalmente nei disegni e nelle specifiche. Sulla base di ISO 1302, i requisiti relativi alla struttura superficiale vengono comunicati tramite simboli grafici standardizzati e indicazioni testuali nella documentazione tecnica del prodotto; in assenza di tali indicazioni, l’intento relativo alla finitura potrebbe non essere interpretato in modo coerente tra i team di progettazione e lavorazione, oppure tra un acquirente e un fornitore.
Fattori che influenzano la tolleranza nei componenti robotici lavorati con macchine a controllo numerico
Tra i fattori che influenzano la tolleranza nei componenti robotici lavorati con macchine a controllo numerico figurano la geometria, il materiale, l’accessibilità dell’utensile, il numero di configurazioni, il sistema di serraggio, l’usura dell’utensile, gli effetti termici e il metodo di ispezione. Le pareti sottili e le cavità profonde sono più difficili da serrare rispetto ai blocchi compatti. Le configurazioni multiple possono aumentare la variazione tra le caratteristiche.
Anche il materiale è importante. Un materiale che si deforma durante la lavorazione può rendere più difficile il controllo delle dimensioni finali. Un pezzo che non può essere ispezionato facilmente può comportare rischi nascosti anche se il processo di lavorazione è stabile.
La definizione delle tolleranze dovrebbe concentrarsi sulla funzionalità. Se si sta valutando un valore di ±0,015 mm, è necessario verificare che la caratteristica richieda effettivamente quel livello di controllo e che il piano di lavorazione e ispezione sia in grado di garantirlo.
Fattori di costo, tolleranza e tempi di consegna
Costo, tolleranza e tempi di consegna sono fattori correlati. Un progetto con molte caratteristiche di precisione elevata può richiedere più cambi di configurazione, tagli più lenti, ispezioni aggiuntive e un numero maggiore di revisioni. Un progetto più semplice, con punti di riferimento chiari, può essere lavorato e ispezionato più rapidamente.
Nel campo della robotica, la decisione relativa ai costi dovrebbe tenere conto del processo iterativo. Un prototipo che risulta economico da realizzare ma difficile da modificare può rallentare il progetto. Una progettazione modulare dei componenti può comportare un costo unitario maggiore, ma riduce il rischio di dover riprogettare il prodotto.
Fattori di costo nella lavorazione CNC su misura per la robotica
I fattori che incidono sui costi nella lavorazione CNC personalizzata per la robotica includono il materiale, le dimensioni del pezzo, la complessità geometrica, il livello di tolleranza, il numero di configurazioni, la finitura superficiale e i requisiti di ispezione.
Tra i principali fattori di costo figurano:
- Tempi di lavorazione prolungati dovuti alla presenza di cavità profonde o a un'elevata asportazione di materiale
- Tolleranze ristrette su molte caratteristiche
- Diverse configurazioni per raggiungere diverse facce
- Fissaggio complesso del pezzo
- Elevato carico di ispezioni
- Disponibilità del materiale
- Esigenze di finitura
- Modifiche al progetto tra una iterazione e l'altra
I componenti robotici su misura spesso costano di più quando il progetto non è ancora definitivo. Se il robot è ancora in fase di collaudo, gli acquirenti devono tenere conto del fatto che le modifiche successive potrebbero incidere sui costi e sui tempi di consegna.
In che modo il peso dei componenti influisce sulle prestazioni dei robot industriali
L'impatto del peso dei componenti sulle prestazioni dei robot industriali è legato alla massa in movimento. Bracci, maglie, pinze ed effettori terminali più pesanti possono influire sull'accelerazione, sull'utilizzo del carico utile, sul fabbisogno energetico e sulla risposta dinamica. La ricerca presentata sostiene l'uso di materiali quali l'alluminio e la plastica nei casi in cui sia richiesta una progettazione leggera.
La riduzione del peso non deve compromettere la rigidità necessaria. Un elemento di collegamento più leggero che si flette eccessivamente può ridurre la ripetibilità. Un dito della pinza più leggero che si usura o si piega può causare errori di manipolazione. L'obiettivo progettuale non è solo il peso minimo, ma una riduzione del peso utile senza compromettere la funzionalità.
Pianificazione delle tolleranze: quando ±0,015 mm può fare la differenza e quando verificare i requisiti
Una tolleranza dell'ordine di ±0,015 mm può essere determinante per gli accoppiamenti dei cuscinetti, i fori di precisione, le interfacce degli ingranaggi, l'allineamento degli alberi e i punti di riferimento relativi ai sensori. Può inoltre essere rilevante quando diversi assi del robot si sovrappongono e piccoli errori possono influire sulla posizione finale dell'utensile o della pinza.
Questo livello di tolleranza dovrebbe essere verificato prima di essere applicato. Il valore fornito proviene da un'unica fonte, pertanto non dovrebbe essere considerato uno standard predefinito. È opportuno valutare se la caratteristica influisca effettivamente sul movimento, se il materiale e la geometria siano in grado di rispettare la tolleranza e se l'ispezione possa dimostrarlo.
Gli elementi meno critici potrebbero non richiedere questo livello di controllo. I fori di passaggio, le cavità di alleggerimento, i coperchi e le superfici non di riferimento possono spesso essere soggetti a requisiti meno rigorosi, purché non compromettano l’assemblaggio o il movimento.
Tabella: Fattori relativi a costi, tolleranze, materiali, configurazione, ispezione e iterazioni
| Fattore | Cosa aumenta la difficoltà | Cosa verificare |
|---|---|---|
| Costo | Geometria complessa, tolleranze ristrette, materiale difficile, finitura aggiuntiva | Quali sono le caratteristiche davvero fondamentali? |
| Tolleranza | Pareti sottili, configurazioni multiple, utensili lunghi, materiale instabile | Schema dei dati e accesso ai fini di controllo |
| Materiale | Peso target, carico richiesto, lavorabilità, disponibilità | Idoneità al movimento e al montaggio |
| Impostazione | Caratteristiche su più lati, forme difficili da serrare | Fissaggio del pezzo e sequenza delle operazioni |
| Ispezione | Fori nascosti, tasche profonde, numerose quote critiche | Metodo di misurazione e criteri di accettazione |
| Iterazione | Frequenti modifiche al progetto, requisiti poco chiari | Piano di prototipazione e controllo delle revisioni |
Questa tabella può essere utilizzata durante la revisione del progetto prima di rilasciare i disegni o i file CAD per la lavorazione.
Applicazioni e casi d'uso dei componenti robotici lavorati con macchine CNC
I componenti robotici lavorati con macchine CNC trovano impiego in diversi tipi di robot, tra cui robot industriali, robot collaborativi, sistemi di automazione personalizzati, sistemi di presa, sistemi di ispezione e robot mobili o agricoli. Il denominatore comune è il controllo meccanico: i componenti devono incastrarsi, muoversi e ripetere i movimenti in condizioni prestabilite.
Sulla base del IFR World Robotics 2025 Secondo il rapporto, nel 2024 le installazioni globali di robot industriali hanno raggiunto le 542.000 unità, più del doppio rispetto a dieci anni fa, con installazioni annuali che hanno superato le 500.000 unità per il quarto anno consecutivo. L’adozione si estende ben oltre i settori tradizionali dell’automotive e dell’aerospaziale: l’industria alimentare, l’agricoltura e l’elettronica figurano tra i settori di applicazione in espansione che oggi trainano la domanda di componenti robotici lavorati con precisione.
Bracci robotici industriali, giunti, ingranaggi e alloggiamenti strutturali
I bracci robotici industriali utilizzano componenti lavorati con macchine a controllo numerico (CNC) laddove sono fondamentali resistenza, ripetibilità e precisione di assemblaggio. Possono essere lavorati i bracci, gli alloggiamenti dei giunti, gli ingranaggi, gli alberi, le staffe e le piastre di montaggio.
Gli alloggiamenti strutturali proteggono motori, ingranaggi, cuscinetti e sensori, fungendo al contempo da riferimento per il loro posizionamento. Poiché gli alloggiamenti spesso combinano superfici di montaggio esterne e cavità interne, richiedono un attento controllo dei punti di riferimento. Se l’alloggiamento non è corretto, molti altri componenti potrebbero comunque essere assemblati, ma il giunto potrebbe non funzionare correttamente.
Sfide produttive relative ai componenti dei robot collaborativi
Le sfide produttive relative ai componenti dei robot collaborativi riguardano spesso il design compatto, le forme esterne levigate, le strutture leggere e l’elevata uniformità di assemblaggio. I cobot possono presentare un involucro molto aderente attorno alle articolazioni, ai sensori e al cablaggio. Ciò può rendere più difficile l’accesso degli utensili e l’ispezione.
I cobot richiedono inoltre una maggiore attenzione al controllo dei movimenti e all'affidabilità dei sensori. Il posizionamento dei sensori, il percorso dei cavi e l'allineamento dei giunti devono essere presi in considerazione sin dalle prime fasi della progettazione. Una piccola modifica alla lavorazione in prossimità di un sensore o di un giunto può influire sulla calibrazione o sull'assemblaggio.
La robotica CNC nei settori automobilistico, aerospaziale, dell'industria alimentare e agricolo
La robotica CNC trova applicazione in diversi settori industriali. L'industria automobilistica e quella aerospaziale sono i settori tradizionali in cui si ricorre alla lavorazione di precisione e all'automazione. L'industria alimentare può avvalersi della robotica per l'affettatura, la movimentazione o il confezionamento, dove l'igiene e la ripetibilità dei movimenti sono fondamentali. L'agricoltura può utilizzare sistemi robotici per la semina, la raccolta, le operazioni di movimentazione e i flussi di lavoro automatizzati di carico e scarico.
Per gli acquirenti, il settore non modifica i controlli di fattibilità di base. La geometria, il materiale, le tolleranze, la finitura superficiale e il controllo qualità continuano a determinare se un pezzo possa essere lavorato con successo. Ciò che cambia sono il contesto operativo e l’onere della convalida.
Note sul caso di studio: pinze elettriche, robotica di sciame, fresatura robotizzata e componenti per bracci robotici
Diversi temi emersi dalla ricerca presentata risultano utili ai fini del processo decisionale.
Le pinze elettriche dimostrano come la movimentazione programmabile eccella nell’automazione di attività ripetitive come il carico e riduca la necessità di utensili di presa personalizzati nelle operazioni CNC ad alta varietà. Ciò favorisce cambi di produzione più rapidi quando le dimensioni dei pezzi variano, rendendola la soluzione ideale per l’impiego di robot nell’alimentazione delle macchine.
La robotica di sciame dimostra come più robot possano supportare attività di assemblaggio o logistiche su larga scala grazie a un funzionamento coordinato. I vantaggi sono la scalabilità e la ridondanza, ma i componenti meccanici richiedono comunque interfacce standardizzate e un assemblaggio affidabile.
La fresatura robotizzata dimostra che i robot articolati sono in grado di eseguire operazioni continue di fresatura, ispezione e assistenza automatizzata alle macchine in alcune attività ad alto volume o su larga scala. Il limite risiede nella rigidità e nella precisione rispetto alle macchine CNC tradizionali.
La lavorazione CNC dei componenti dei bracci robotici consente di realizzare rapidamente prototipi e di produrre bracci, giunti, ingranaggi e alloggiamenti utilizzando materiali quali acciaio, alluminio e plastica. La scelta dipende comunque dalla geometria, dal carico, dalla tolleranza e dai controlli di qualità.
Guida decisionale: Come valutare la lavorazione CNC per la robotica
La valutazione della lavorazione CNC per la robotica dovrebbe partire dalla funzione del robot, non dal processo di produzione. Il pezzo dovrebbe essere esaminato tenendo conto del carico di movimento, dei requisiti di tolleranza, della scelta del materiale, della finitura superficiale, delle capacità del fornitore e del piano di controllo.
La lavorazione CNC dà il meglio di sé quando il pezzo richiede precisione, resistenza, ripetibilità di assemblaggio o iterazioni rapide senza l'utilizzo di utensili dedicati. Può risultare meno adatta quando la geometria del pezzo è inaccessibile agli utensili da taglio, quando le tolleranze richieste sono irrealistiche o quando il progetto non è stato valutato in termini di serraggio e ispezione.
Quando sono necessari ingranaggi su misura nei sistemi robotici
Quando nei sistemi robotici sono necessari ingranaggi su misura, ciò è solitamente dovuto a esigenze legate all’imballaggio, al controllo del movimento, alla trasmissione della coppia o all’integrazione con un albero o un alloggiamento non standard. Gli ingranaggi standard potrebbero non adattarsi allo spazio disponibile o alla configurazione di montaggio.
È opportuno prendere in considerazione l'utilizzo di ingranaggi su misura nei seguenti casi:
- L'articolazione del robot richiede una configurazione specifica degli ingranaggi
- Il budget a disposizione è limitato
- L'albero, il foro o il mozzo non sono standard
- L'allineamento degli ingranaggi deve corrispondere all'alloggiamento personalizzato
- I test sui prototipi richiedono modifiche rapide al progetto
Prima dell'approvazione, verificare non solo l'ingranaggio, ma anche l'albero di accoppiamento, i cuscinetti, l'alloggiamento e il piano di ispezione.
Cosa devono verificare gli acquirenti prima di approvare un componente robotico lavorato a CNC?
Prima dell’approvazione, gli acquirenti devono verificare che il fornitore abbia già realizzato parti simili, sia in grado di ispezionare i punti di riferimento e le caratteristiche critiche con attrezzature adeguate e possa collegare i controlli in corso di lavorazione alla verifica finale. È necessario esaminare il controllo delle revisioni, la tracciabilità dei materiali e dei processi, la sequenza di installazione degli inserti e dei trattamenti superficiali, nonché verificare che i risultati del primo articolo riflettano la stessa strategia di riferimento utilizzata nell’assemblaggio. L’approvazione deve basarsi sulla comprovata capacità di lavorare e ispezionare in modo coerente la geometria e il materiale scelti, non solo su una risposta nominale al preventivo.
Tra i controlli importanti figurano:
- Le caratteristiche fondamentali sono chiaramente identificate
- Le tolleranze vengono assegnate in base alla funzione
- Lo schema di riferimento è conforme all'uso previsto nell'assieme
- Il materiale è adatto alle esigenze di carico, peso e lavorazione
- La finitura superficiale viene definita laddove influisce sul movimento o sull’alloggiamento
- I supporti dei sensori e le caratteristiche dei giunti fanno riferimento agli stessi dati di riferimento
- Il metodo di ispezione è chiaro
- È in vigore un sistema di controllo delle revisioni per i prototipi
L'acquirente dovrebbe inoltre verificare se il pezzo si tratti di un prototipo, di un pezzo di transizione o di un componente di produzione. Ogni fase comporta un rischio diverso.
Quando la lavorazione CNC è la soluzione più indicata per i prototipi nel campo della robotica e per le piccole serie?
La lavorazione CNC è spesso particolarmente indicata per prototipi e piccole serie, poiché la geometria può essere modificata senza ricorrere a utensili fissi; tuttavia, il passaggio alla produzione in serie di solito cambia le carte in tavola. Con l’aumentare dei volumi, i team dovrebbero rivedere i tempi di congelamento del progetto, riprogettare le attrezzature di fissaggio e rendere la tecnologia CNC accessibile anche ai produttori più piccoli attraverso la razionalizzazione delle tolleranze e una pianificazione ripetibile delle ispezioni, valutando inoltre se un altro processo risulti più economico per le caratteristiche non critiche. Un prototipo tecnicamente lavorabile non rappresenta automaticamente la soluzione di produzione più adeguata.
È particolarmente utile per bracci personalizzati, dita di presa, staffe per sensori, alloggiamenti per giunti e ingranaggi. Potrebbe risultare meno efficiente per pezzi prodotti in volumi molto elevati, qualora, una volta stabilizzato il progetto, un altro processo sia in grado di soddisfare le stesse esigenze in termini di tolleranze e materiali.
Confrontare la lavorazione CNC con metodi alternativi prima del rilascio. Utilizzare la stampa 3D per iterazioni rapide o forme complesse soggette a carichi ridotti, la fusione o lo stampaggio quando i volumi giustificano l’investimento in attrezzature, la lavorazione della lamiera per protezioni e coperture, e articoli standard da catalogo quando cuscinetti, riduttori, guide o profili soddisfano già i requisiti di interfaccia e carico. Scegliere la lavorazione su misura quando il pezzo deve garantire allineamento, accoppiamenti dei cuscinetti, rigidità o ingombri che i componenti standard non sono in grado di soddisfare.
Per i prototipi, la fase più importante consiste nel raccogliere i feedback. Se un giunto lavorato presenta attrito eccessivo o se un dito della pinza si usura, la revisione successiva dovrebbe prevedere l'aggiornamento del modello CAD, del piano delle tolleranze o della scelta dei materiali.
Matrice decisionale: materiale, tolleranza, carico dinamico, finitura superficiale, capacità del fornitore, piano di ispezione
| Area decisionale | Ricorrere alla lavorazione CNC quando | Controlla attentamente quando |
|---|---|---|
| Materiale | L'acciaio, l'alluminio o la plastica si adattano alle esigenze di carico e di lavorazione | Il peso, l'usura o i carichi elevati mettono a dura prova i limiti del materiale |
| Tolleranza | Le caratteristiche critiche richiedono una precisione di accoppiamento e una ripetibilità controllate | Alle caratteristiche non critiche vengono applicate tolleranze strette |
| Carico dinamico | Il componente sostiene cuscinetti, ingranaggi, alberi o pinze | Le pareti sottili o le cavità riducono la rigidità |
| Finitura superficiale | Le superfici di contatto, di appoggio o rotanti richiedono una finitura controllata | La finitura ha solo una funzione estetica, ma comporta un aumento dei costi |
| Capacità dei fornitori | Il processo può supportare la geometria, la configurazione e il controllo | Il pezzo richiede numerose regolazioni o presenta caratteristiche difficili da misurare |
| Piano di ispezione | Le dimensioni critiche sono misurabili | Funzionalità nascoste o dati poco chiari comportano un rischio di mancata accettazione |
| Iterazione | Sono previste modifiche al progetto | Le revisioni sono frequenti, ma i requisiti non sono chiari |
In sintesi, la lavorazione CNC per la robotica rappresenta una valida opzione quando il componente deve garantire il controllo del movimento, l'adattamento o la ripetibilità. È invece consigliabile evitarla o riprogettare il componente quando la geometria non è accessibile, il componente è troppo flessibile per rispettare le tolleranze o il piano di tolleranza è più rigoroso di quanto richiesto dalla funzione.
Domande frequenti
Quali parti di un robot vengono solitamente lavorate con macchine a controllo numerico (CNC)?
La lavorazione CNC per la robotica consente di produrre componenti fondamentali dei robot, tra cui bracci, maglie, giunti, ingranaggi, alloggiamenti, dita delle pinze e staffe per sensori. Queste unità chiave determinano l’accoppiamento meccanico, la stabilità del movimento, l’allineamento strutturale e il trasferimento del carico negli assemblaggi robotici. Ogni interfaccia di movimento e di montaggio richiede una lavorazione di precisione per garantire una ripetibilità costante e prestazioni di assemblaggio ottimali. I componenti lavorati di qualità prolungano inoltre la durata utile e assicurano un funzionamento affidabile nei sistemi robotici industriali e collaborativi.
Quali sono i materiali migliori per realizzare componenti robotici leggeri?
I componenti leggeri in alluminio rappresentano la scelta ideale per le strutture robotiche, grazie al giusto equilibrio tra massa ridotta, rigidità ed eccellente lavorabilità per i componenti mobili. L’acciaio è adatto alle applicazioni soggette a carichi elevati e a forte usura, mentre le materie plastiche speciali sono ideali per coperture e staffe robotiche non strutturali soggette a carichi ridotti. La scelta dei materiali deve tenere conto delle esigenze relative al carico utile, alla velocità di movimento e alle condizioni ambientali, al fine di ottimizzare le prestazioni complessive del robot. La scelta corretta della lega evita flessioni, affaticamento e peso superfluo che potrebbero ridurre l’efficienza dei movimenti del robot.
Quale tolleranza è richiesta per i giunti robotici?
I requisiti di tolleranza variano a seconda della funzione del giunto, dell’accoppiamento dei cuscinetti, dell’allineamento degli ingranaggi e dell’accumulo delle tolleranze di assemblaggio nei progetti robotici. I giunti robotici lavorati con precisione tramite CNC sono sottoposti a un rigoroso controllo dimensionale per garantire la precisione di posizionamento e un movimento rotatorio fluido. Per la robotica avanzata viene indicato un parametro di riferimento di precisione pari a ±0,015 mm, sebbene tale valore debba essere convalidato in base al materiale, alla geometria e alle capacità del fornitore. Tolleranze ben pianificate prevengono il disallineamento, l’usura e la deriva di calibrazione nelle strutture dei robot articolati.
In che modo la lavorazione CNC supporta i robot collaborativi?
La lavorazione CNC consente di realizzare alloggiamenti compatti, supporti per sensori, componenti per pinze e collegamenti strutturali progettati specificamente per le configurazioni dei robot collaborativi. L'accuratezza dimensionale e l'elevata ripetibilità consentono movimenti sicuri e fluidi per l'interazione uomo-robot negli ambienti di lavoro. Il processo supporta inoltre la prototipazione rapida e la personalizzazione di piccoli lotti per accelerare l'iterazione progettuale dei cobot e l'ottimizzazione strutturale. L'affidabile precisione dei componenti garantisce stabilità a lungo termine e un'ampia diffusione industriale dei moderni robot collaborativi.
Componenti robotici su misura o standard?
Gli ingranaggi su misura per i robot sono necessari quando i componenti standard non riescono ad adattarsi a ingombri ridotti, a dimensioni di albero particolari o a esigenze specifiche di trasmissione della coppia. I componenti disponibili in commercio si adattano alle strutture robotiche generiche, riducendo i costi di produzione e abbreviando notevolmente i tempi di realizzazione dei progetti. Gli ingegneri valutano i limiti di spazio, i requisiti di carico e la precisione di allineamento per scegliere tra parti lavorate su misura e parti già pronte. La scelta giusta garantisce un equilibrio tra prestazioni, budget, tempi di realizzazione e manutenzione futura per sistemi di automazione robotica completi.
Riferimenti
https://www.asminternational.org